

Benefits of combined GPS/GLONASS with low-cost MEMS IMUs for vehicular urban navigation
- PMID: 22666079
- PMCID: PMC3355462
- DOI: 10.3390/s120405134
Benefits of combined GPS/GLONASS with low-cost MEMS IMUs for vehicular urban navigation
Abstract
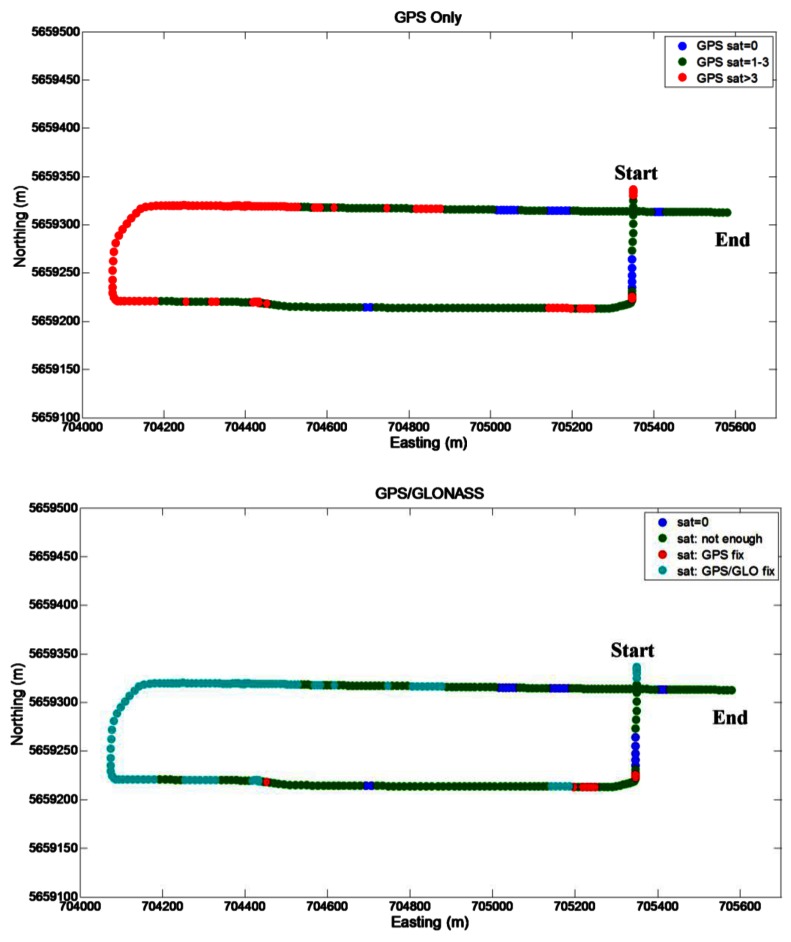
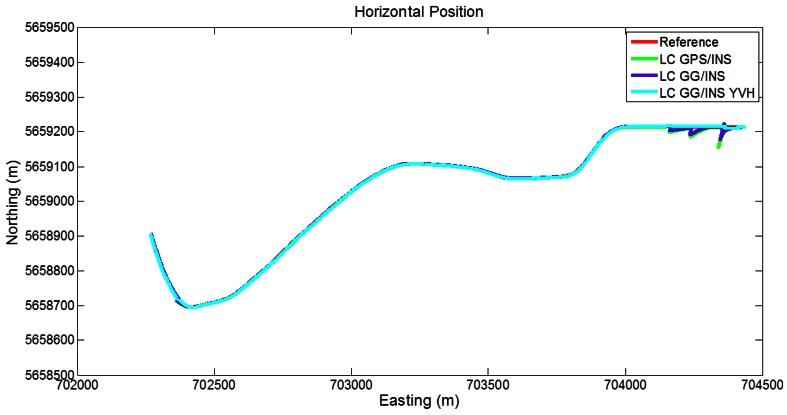
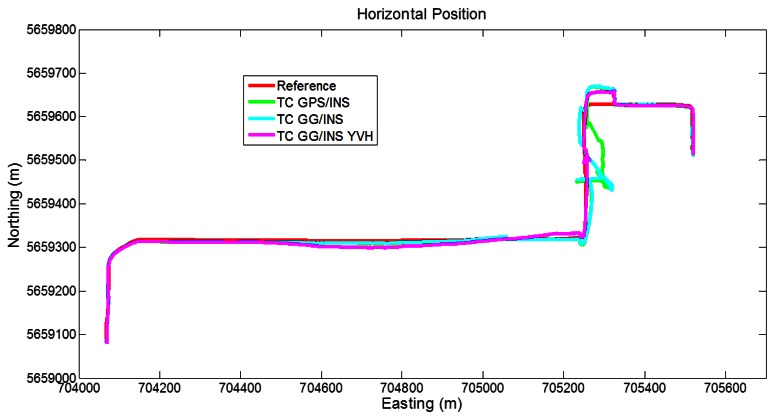
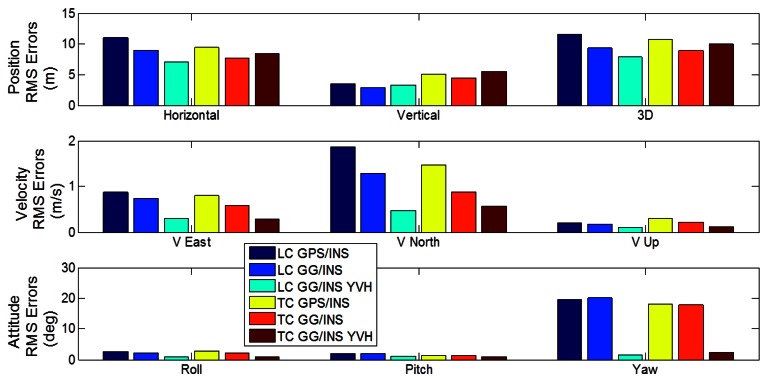
The integration of Global Navigation Satellite Systems (GNSS) with Inertial Navigation Systems (INS) has been very actively researched for many years due to the complementary nature of the two systems. In particular, during the last few years the integration with micro-electromechanical system (MEMS) inertial measurement units (IMUs) has been investigated. In fact, recent advances in MEMS technology have made possible the development of a new generation of low cost inertial sensors characterized by small size and light weight, which represents an attractive option for mass-market applications such as vehicular and pedestrian navigation. However, whereas there has been much interest in the integration of GPS with a MEMS-based INS, few research studies have been conducted on expanding this application to the revitalized GLONASS system. This paper looks at the benefits of adding GLONASS to existing GPS/INS(MEMS) systems using loose and tight integration strategies. The relative benefits of various constraints are also assessed. Results show that when satellite visibility is poor (approximately 50% solution availability) the benefits of GLONASS are only seen with tight integration algorithms. For more benign environments, a loosely coupled GPS/GLONASS/INS system offers performance comparable to that of a tightly coupled GPS/INS system, but with reduced complexity and development time.
Keywords: GLONASS; GPS; Kalman filter; loosely coupled; pseudo-observations; tightly coupled.
Figures














References
-
- Cai C., Gao Y. A Combined GPS/GLONASS navigation algorithm for use with limited satellite visibility. J. Navig. 2009;62:671–685.
-
- Ong R., Petovello M.G., Lachapelle G. Reliability of ambiguity resolution using GPS and GLONASS. Proceedings of International Technical Meeting of Institute of Navigation; San Diego, CA, USA. January 2010; pp. 591–606.
-
- Ryan S., Petovello M.G., Lachapelle G. Augmentation of GPS for ship navigation in constricted water ways. In: Uijt de Haag M., Gebre-Egziabher D., Petovello M.G., editors. ION GPS Redbook Vol. VII Integrated Systems. The Institute of Navigation; Manassas, VA, USA: 2010. pp. 206–214.
-
- Hewitson S., Wang J. Extended receiver autonomous integrity monitoring (eRAIM) for GNSS/INS integration. J. Surv. Eng. 2010;136:13–22.
-
- Godha S. M.S. Thesis. University of Calgary; Calgary, AB, Canada: 2006. Performance Evaluation of a Low Cost DGPS MEMS-Based IMU Integrated with DGPS for Land Vehicle Navigation Application.
LinkOut - more resources
Full Text Sources
