

Real-time myoelectric control of a multi-fingered hand prosthesis using principal components analysis
- PMID: 22703711
- PMCID: PMC3474163
- DOI: 10.1186/1743-0003-9-40
Real-time myoelectric control of a multi-fingered hand prosthesis using principal components analysis
Abstract
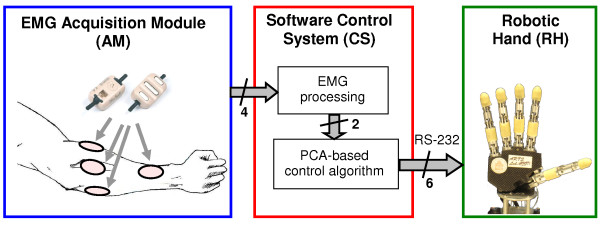
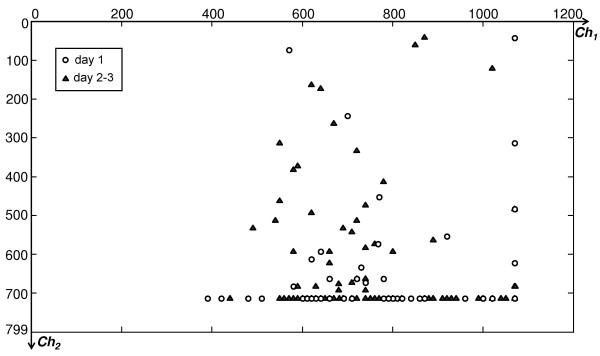
Background: In spite of the advances made in the design of dexterous anthropomorphic hand prostheses, these sophisticated devices still lack adequate control interfaces which could allow amputees to operate them in an intuitive and close-to-natural way. In this study, an anthropomorphic five-fingered robotic hand, actuated by six motors, was used as a prosthetic hand emulator to assess the feasibility of a control approach based on Principal Components Analysis (PCA), specifically conceived to address this problem. Since it was demonstrated elsewhere that the first two principal components (PCs) can describe the whole hand configuration space sufficiently well, the controller here employed reverted the PCA algorithm and allowed to drive a multi-DoF hand by combining a two-differential channels EMG input with these two PCs. Hence, the novelty of this approach stood in the PCA application for solving the challenging problem of best mapping the EMG inputs into the degrees of freedom (DoFs) of the prosthesis.
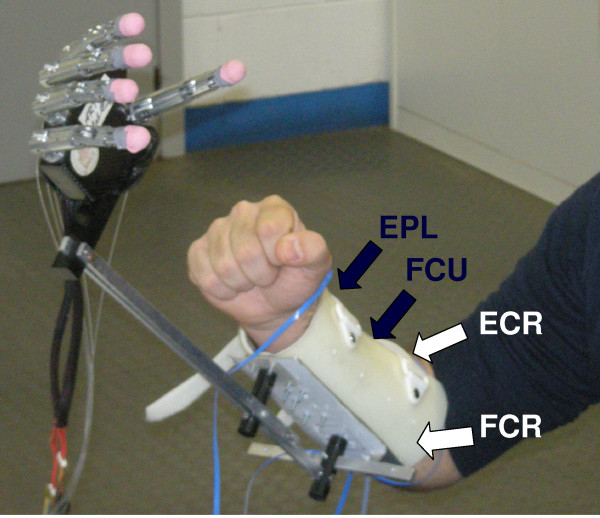
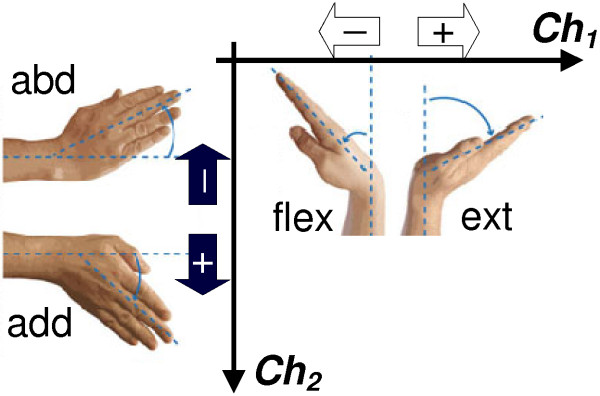
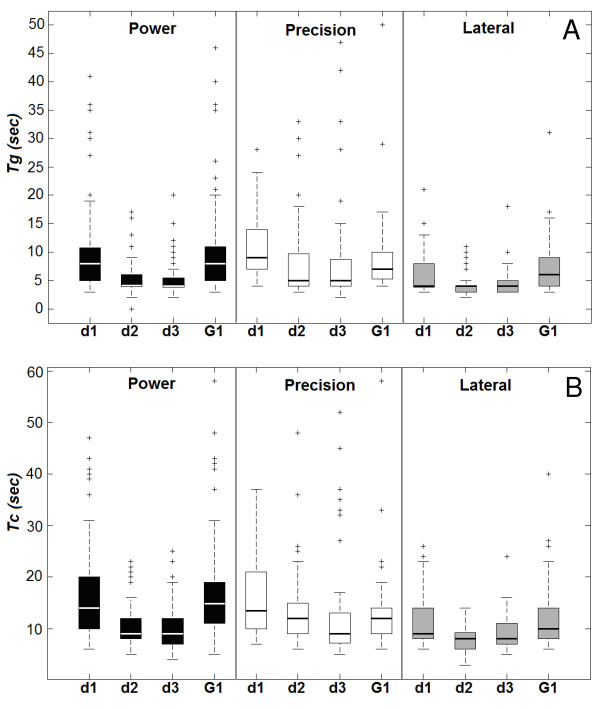
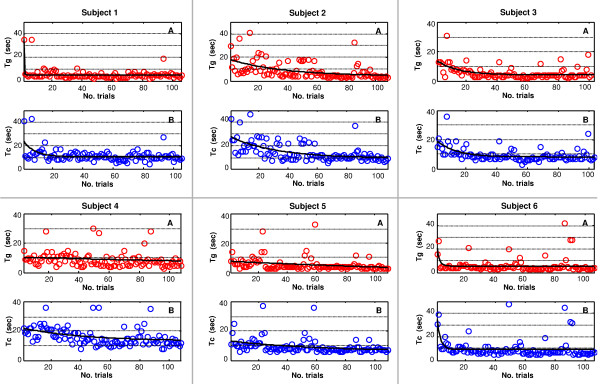
Methods: A clinically viable two DoFs myoelectric controller, exploiting two differential channels, was developed and twelve able-bodied participants, divided in two groups, volunteered to control the hand in simple grasp trials, using forearm myoelectric signals. Task completion rates and times were measured. The first objective (assessed through one group of subjects) was to understand the effectiveness of the approach; i.e., whether it is possible to drive the hand in real-time, with reasonable performance, in different grasps, also taking advantage of the direct visual feedback of the moving hand. The second objective (assessed through a different group) was to investigate the intuitiveness, and therefore to assess statistical differences in the performance throughout three consecutive days.
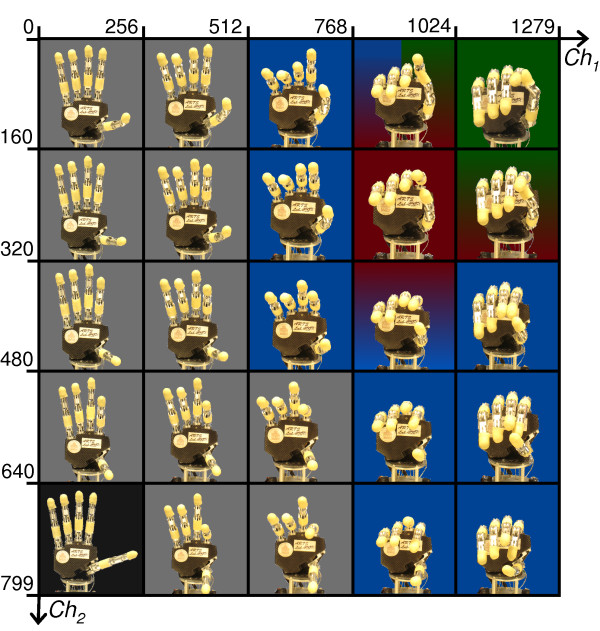
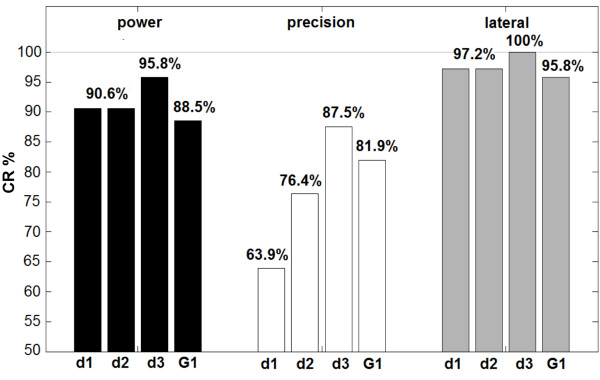
Results: Subjects performed several grasp, transport and release trials with differently shaped objects, by operating the hand with the myoelectric PCA-based controller. Experimental trials showed that the simultaneous use of the two differential channels paradigm was successful.
Conclusions: This work demonstrates that the proposed two-DoFs myoelectric controller based on PCA allows to drive in real-time a prosthetic hand emulator into different prehensile patterns with excellent performance. These results open up promising possibilities for the development of intuitive, effective myoelectric hand controllers.
Figures
Similar articles
-
Bio-inspired controller for a dexterous prosthetic hand based on Principal Components Analysis.Annu Int Conf IEEE Eng Med Biol Soc. 2009;2009:5022-5. doi: 10.1109/IEMBS.2009.5333826. Annu Int Conf IEEE Eng Med Biol Soc. 2009. PMID: 19964659
-
Principal components analysis based control of a multi-DoF underactuated prosthetic hand.J Neuroeng Rehabil. 2010 Apr 23;7:16. doi: 10.1186/1743-0003-7-16. J Neuroeng Rehabil. 2010. PMID: 20416036 Free PMC article.
-
A synergy-driven approach to a myoelectric hand.IEEE Int Conf Rehabil Robot. 2013 Jun;2013:6650377. doi: 10.1109/ICORR.2013.6650377. IEEE Int Conf Rehabil Robot. 2013. PMID: 24187196
-
Study of issues in the development of surface EMG controlled human hand.J Mater Sci Mater Med. 2009 Dec;20 Suppl 1:S107-14. doi: 10.1007/s10856-008-3492-4. Epub 2008 Jun 25. J Mater Sci Mater Med. 2009. PMID: 18575977 Review.
-
Soft Robotics Enables Neuroprosthetic Hand Design.ACS Nano. 2023 Jun 13;17(11):9661-9672. doi: 10.1021/acsnano.3c01474. Epub 2023 May 17. ACS Nano. 2023. PMID: 37196348 Review.
Cited by
-
Dimensionality analysis of forearm muscle activation for myoelectric control in transradial amputees.PLoS One. 2020 Dec 3;15(12):e0242921. doi: 10.1371/journal.pone.0242921. eCollection 2020. PLoS One. 2020. PMID: 33270686 Free PMC article.
-
A neuro-fuzzy system for characterization of arm movements.Sensors (Basel). 2013 Feb 21;13(2):2613-30. doi: 10.3390/s130202613. Sensors (Basel). 2013. PMID: 23429579 Free PMC article.
-
Transfer learning using low-dimensional subspaces for EMG-based classification of hand posture.Int IEEE EMBS Conf Neural Eng. 2019 Mar;2019:1097-1100. doi: 10.1109/ner.2019.8717180. Epub 2019 May 20. Int IEEE EMBS Conf Neural Eng. 2019. PMID: 32818047 Free PMC article.
-
Comparison of Myoelectric Control Schemes for Simultaneous Hand and Wrist Movement using Chronically Implanted Electromyography: A Case Series.Annu Int Conf IEEE Eng Med Biol Soc. 2021 Nov;2021:6224-6230. doi: 10.1109/EMBC46164.2021.9630845. Annu Int Conf IEEE Eng Med Biol Soc. 2021. PMID: 34892537 Free PMC article.
-
Linear and Non-linear Dimensionality-Reduction Techniques on Full Hand Kinematics.Front Bioeng Biotechnol. 2020 May 5;8:429. doi: 10.3389/fbioe.2020.00429. eCollection 2020. Front Bioeng Biotechnol. 2020. PMID: 32432105 Free PMC article.
References
-
- Dalley SA, Wiste TE, Withrow TJ, Goldfarb M. Design of a multifunctional anthropomorphic prosthetic hand with extrinsic actuation. IEEE/ASME Trans Mechatron. 2009;14(6):699–706.
-
- Hudgins B, Parker P, Scott R. Control of artificial limbs using myoelectric pattern recognition. Med Life Sci Eng. 1994;13:21–38.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
