

Three-dimensional modular control of human walking
- PMID: 22727468
- PMCID: PMC3405171
- DOI: 10.1016/j.jbiomech.2012.05.037
Three-dimensional modular control of human walking
Abstract
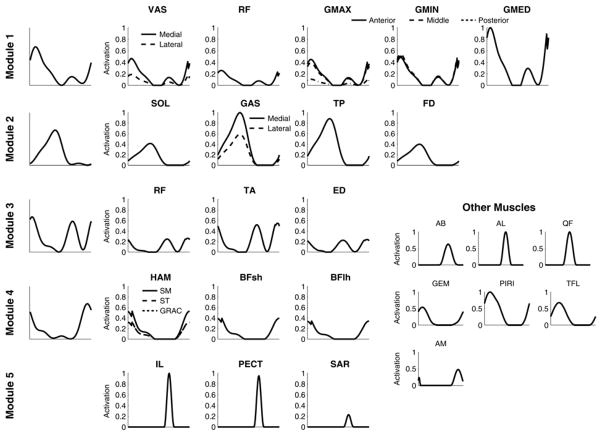
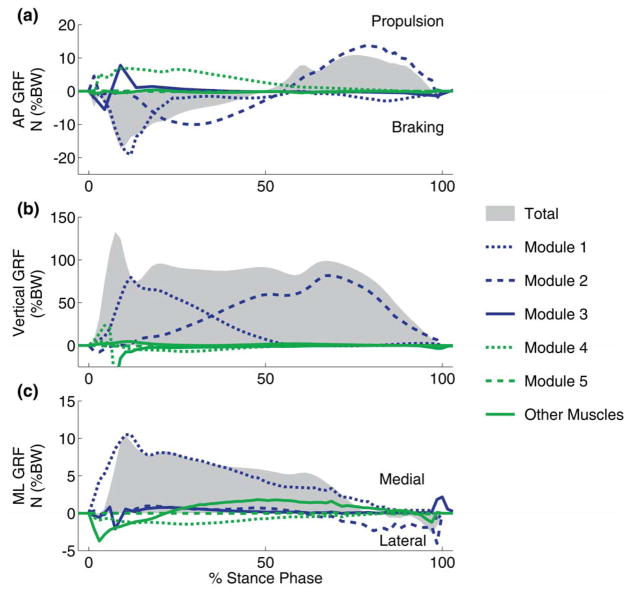
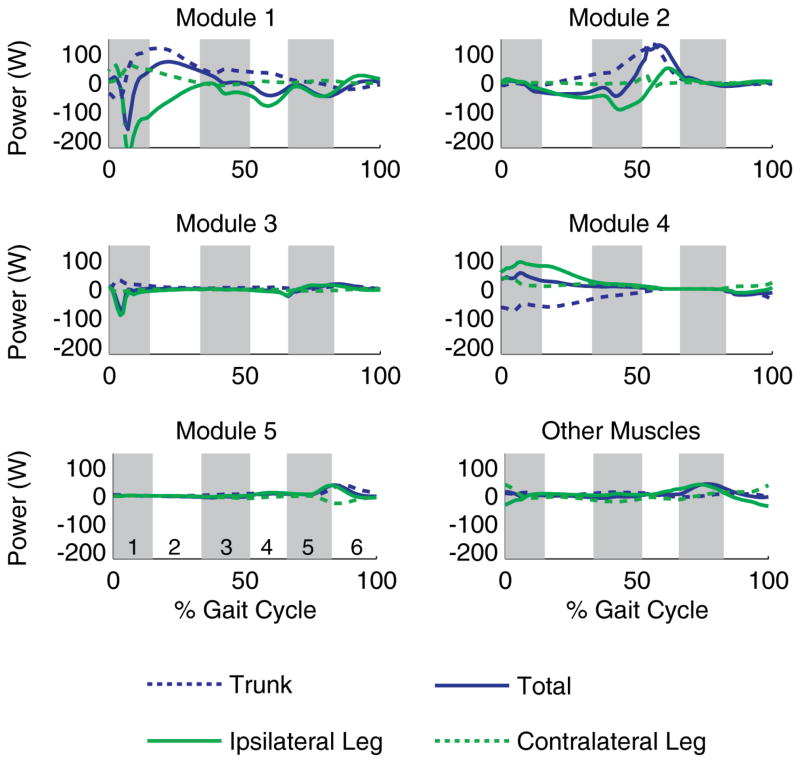
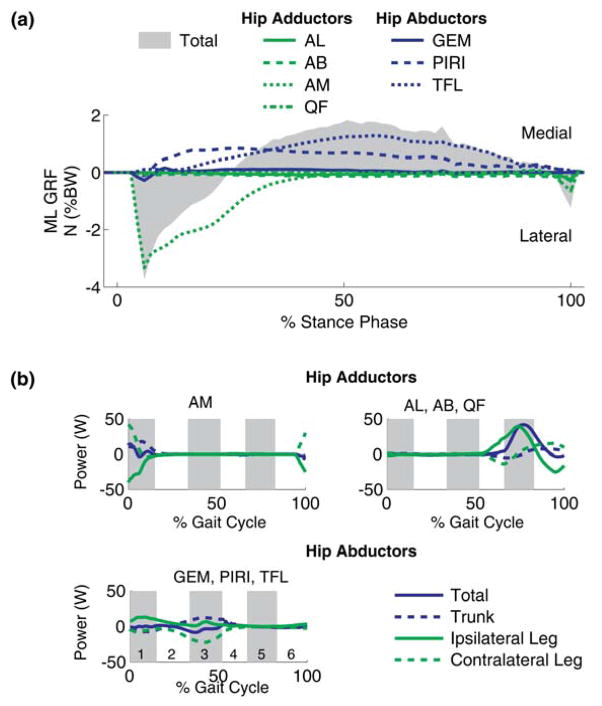
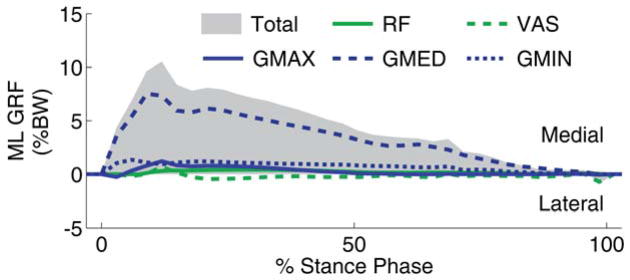
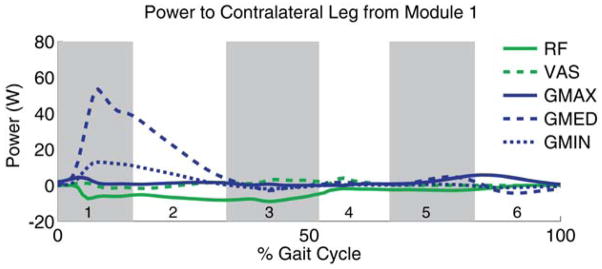
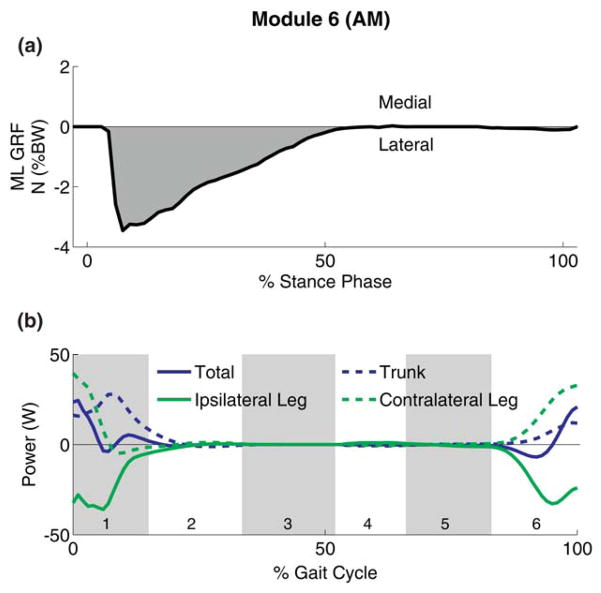
Recent studies have suggested that complex muscle activity during walking may be controlled using a reduced neural control strategy organized around the co-excitation of multiple muscles, or modules. Previous computer simulation studies have shown that five modules satisfy the sagittal-plane biomechanical sub-tasks of 2D walking. The present study shows that a sixth module, which contributes primarily to mediolateral balance control and contralateral leg swing, is needed to satisfy the additional non-sagittal plane demands of 3D walking. Body support was provided by Module 1 (hip and knee extensors, hip abductors) in early stance and Module 2 (plantarflexors) in late stance. In early stance, forward propulsion was provided by Module 4 (hamstrings), but net braking occurred due to Modules 1 and 2. Forward propulsion was provided by Module 2 in late stance. Module 1 accelerated the body medially throughout stance, dominating the lateral acceleration in early stance provided by Modules 4 and 6 (adductor magnus) and in late stance by Module 2, except near toe-off. Modules 3 (ankle dorsiflexors, rectus femoris) and 5 (hip flexors and adductors except adductor magnus) accelerated the ipsilateral leg forward in early swing whereas Module 4 decelerated the ipsilateral leg prior to heel-strike. Finally, Modules 1, 4 and 6 accelerated the contralateral leg forward prior to and during contralateral swing. Since the modules were based on experimentally measured muscle activity, these results provide further evidence that a simple neural control strategy involving muscle activation modules organized around task-specific biomechanical functions may be used to control complex human movements.
Copyright © 2012 Elsevier Ltd. All rights reserved.
Conflict of interest statement
There is no conflict of interest regarding the publication of this manuscript.
Figures
References
-
- Anderson FC. Doctoral Dissertation. The University of Texas; Austin, Austin, TX: 1999. A dynamic optimization solution for a complete cycle of normal gait.
-
- Cappellini G, Ivanenko YP, Poppele RE, Lacquaniti F. Motor Patterns in Human Walking and Running. J Neurophysiol. 2006;95 (6):3426–3437. - PubMed
-
- d’Avella A, Saltiel P, Bizzi E. Combinations of muscle synergies in the construction of a natural motor behavior. Nat Neurosci. 2003;6 (3):300–8. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
