Proximal versus distal control of two-joint planar reaching movements in the presence of neuromuscular noise
- PMID: 22757504
- PMCID: PMC5413135
- DOI: 10.1115/1.4006811
Proximal versus distal control of two-joint planar reaching movements in the presence of neuromuscular noise
Abstract
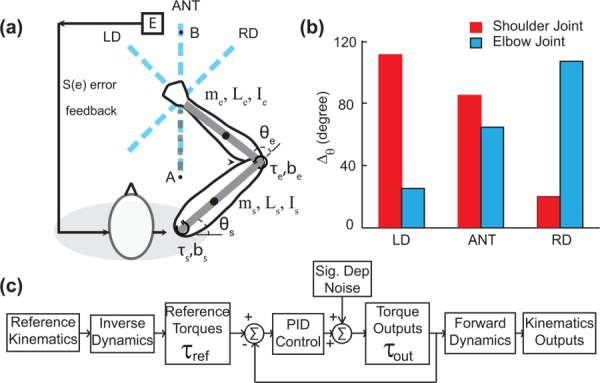
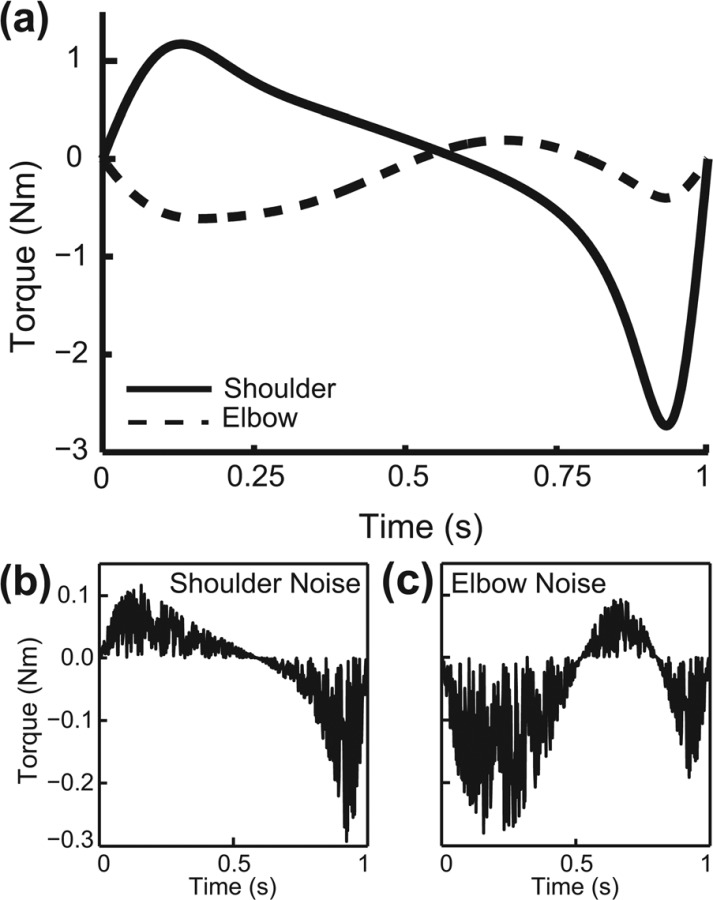
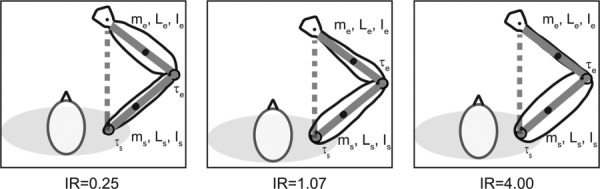
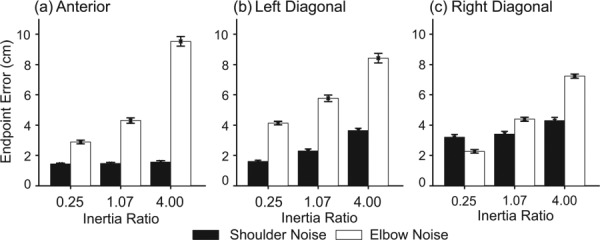
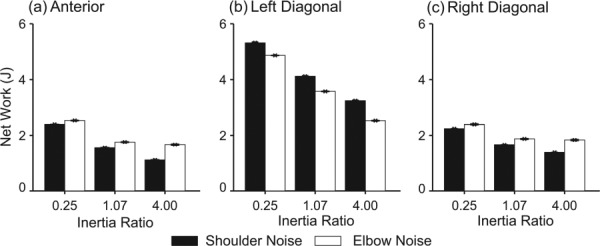
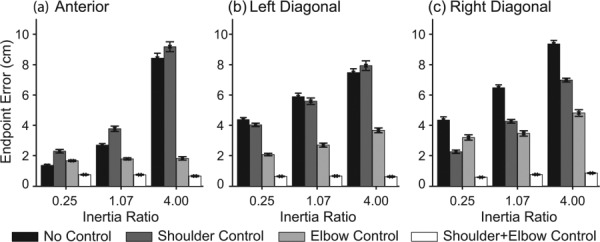
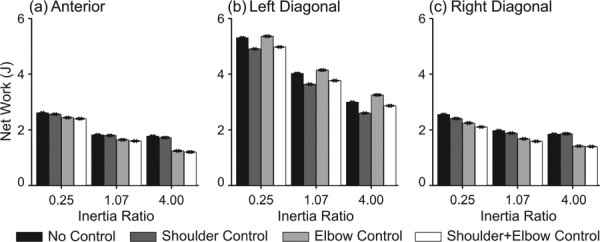
Determining how the human nervous system contends with neuro-motor noise is vital to understanding how humans achieve accurate goal-directed movements. Experimentally, people learning skilled tasks tend to reduce variability in distal joint movements more than in proximal joint movements. This suggests that they might be imposing greater control over distal joints than proximal joints. However, the reasons for this remain unclear, largely because it is not experimentally possible to directly manipulate either the noise or the control at each joint independently. Therefore, this study used a 2 degree-of-freedom torque driven arm model to determine how different combinations of noise and/or control independently applied at each joint affected the reaching accuracy and the total work required to make the movement. Signal-dependent noise was simultaneously and independently added to the shoulder and elbow torques to induce endpoint errors during planar reaching. Feedback control was then applied, independently and jointly, at each joint to reduce endpoint error due to the added neuromuscular noise. Movement direction and the inertia distribution along the arm were varied to quantify how these biomechanical variations affected the system performance. Endpoint error and total net work were computed as dependent measures. When each joint was independently subjected to noise in the absence of control, endpoint errors were more sensitive to distal (elbow) noise than to proximal (shoulder) noise for nearly all combinations of reaching direction and inertia ratio. The effects of distal noise on endpoint errors were more pronounced when inertia was distributed more toward the forearm. In contrast, the total net work decreased as mass was shifted to the upper arm for reaching movements in all directions. When noise was present at both joints and joint control was implemented, controlling the distal joint alone reduced endpoint errors more than controlling the proximal joint alone for nearly all combinations of reaching direction and inertia ratio. Applying control only at the distal joint was more effective at reducing endpoint errors when more of the mass was more proximally distributed. Likewise, controlling the distal joint alone required less total net work than controlling the proximal joint alone for nearly all combinations of reaching distance and inertia ratio. It is more efficient to reduce endpoint error and energetic cost by selectively applying control to reduce variability in the distal joint than the proximal joint. The reasons for this arise from the biomechanical configuration of the arm itself.
Figures
Similar articles
-
Proximal-distal differences in movement smoothness reflect differences in biomechanics.J Neurophysiol. 2017 Mar 1;117(3):1239-1257. doi: 10.1152/jn.00712.2015. Epub 2016 Dec 21. J Neurophysiol. 2017. PMID: 28003410 Free PMC article.
-
Compensating for intersegmental dynamics across the shoulder, elbow, and wrist joints during feedforward and feedback control.J Neurophysiol. 2017 Oct 1;118(4):1984-1997. doi: 10.1152/jn.00178.2017. Epub 2017 Jul 12. J Neurophysiol. 2017. PMID: 28701534 Free PMC article.
-
Minimizing endpoint variability through reinforcement learning during reaching movements involving shoulder, elbow and wrist.PLoS One. 2017 Jul 18;12(7):e0180803. doi: 10.1371/journal.pone.0180803. eCollection 2017. PLoS One. 2017. PMID: 28719661 Free PMC article.
-
The Strategy of Human Movement Control and Teaching Motor Skills in Norm and Pathology.J Mot Behav. 2024;56(1):103-107. doi: 10.1080/00222895.2023.2229769. Epub 2023 Jul 2. J Mot Behav. 2024. PMID: 37394418 Review.
-
A guide to inter-joint coordination characterization for discrete movements: a comparative study.J Neuroeng Rehabil. 2023 Sep 30;20(1):132. doi: 10.1186/s12984-023-01252-2. J Neuroeng Rehabil. 2023. PMID: 37777814 Free PMC article. Review.
Cited by
-
Locomotor control of limb force switches from minimal intervention principle in early adaptation to noise reduction in late adaptation.J Neurophysiol. 2015 Mar 1;113(5):1451-61. doi: 10.1152/jn.00246.2014. Epub 2014 Dec 4. J Neurophysiol. 2015. PMID: 25475343 Free PMC article.
-
A Hybrid Framework for Understanding and Predicting Human Reaching Motions.Front Robot AI. 2018 Mar 27;5:27. doi: 10.3389/frobt.2018.00027. eCollection 2018. Front Robot AI. 2018. PMID: 33500914 Free PMC article.
-
An Inverse Optimal Control Approach to Explain Human Arm Reaching Control Based on Multiple Internal Models.Sci Rep. 2018 Apr 3;8(1):5583. doi: 10.1038/s41598-018-23792-7. Sci Rep. 2018. PMID: 29615692 Free PMC article.
References
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources