

Sensitivity to prediction error in reach adaptation
- PMID: 22773782
- PMCID: PMC3774589
- DOI: 10.1152/jn.00177.2012
Sensitivity to prediction error in reach adaptation
Abstract
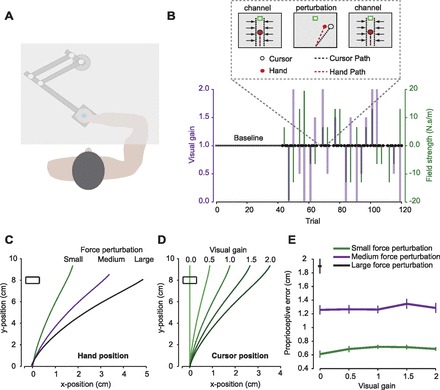
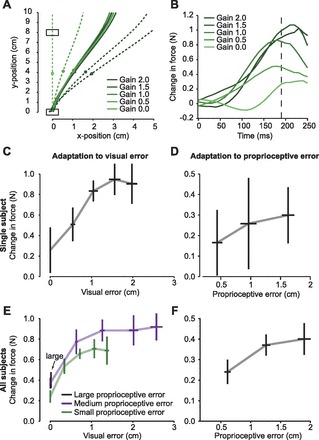
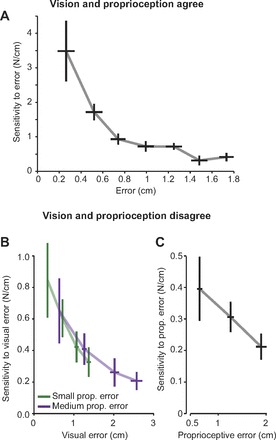
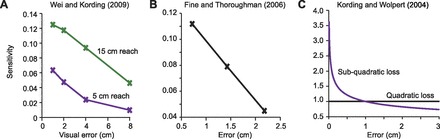
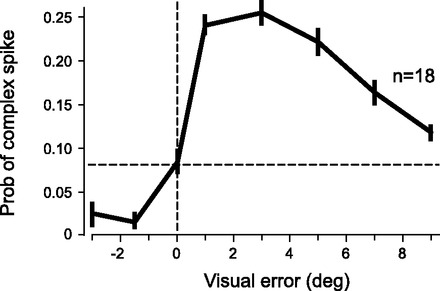
It has been proposed that the brain predicts the sensory consequences of a movement and compares it to the actual sensory feedback. When the two differ, an error signal is formed, driving adaptation. How does an error in one trial alter performance in the subsequent trial? Here we show that the sensitivity to error is not constant but declines as a function of error magnitude. That is, one learns relatively less from large errors compared with small errors. We performed an experiment in which humans made reaching movements and randomly experienced an error in both their visual and proprioceptive feedback. Proprioceptive errors were created with force fields, and visual errors were formed by perturbing the cursor trajectory to create a visual error that was smaller, the same size, or larger than the proprioceptive error. We measured single-trial adaptation and calculated sensitivity to error, i.e., the ratio of the trial-to-trial change in motor commands to error size. We found that for both sensory modalities sensitivity decreased with increasing error size. A reanalysis of a number of previously published psychophysical results also exhibited this feature. Finally, we asked how the brain might encode sensitivity to error. We reanalyzed previously published probabilities of cerebellar complex spikes (CSs) and found that this probability declined with increasing error size. From this we posit that a CS may be representative of the sensitivity to error, and not error itself, a hypothesis that may explain conflicting reports about CSs and their relationship to error.
Figures
References
-
- Albus JS. A theory of cerebellar function. Math Biosci 10: 25–61, 1971
-
- Bock O, Thomas M. Proprioception plays a different role for sensorimotor adaptation to different distortions. Hum Mov Sci 30: 415–423, 2011 - PubMed
-
- Catz N, Dicke PW, Thier P. Cerebellar complex spike firing is suitable to induce as well as to stabilize motor learning. Curr Biol 15: 2179–2189, 2005 - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources