

Extending body space in immersive virtual reality: a very long arm illusion
- PMID: 22829891
- PMCID: PMC3400672
- DOI: 10.1371/journal.pone.0040867
Extending body space in immersive virtual reality: a very long arm illusion
Abstract
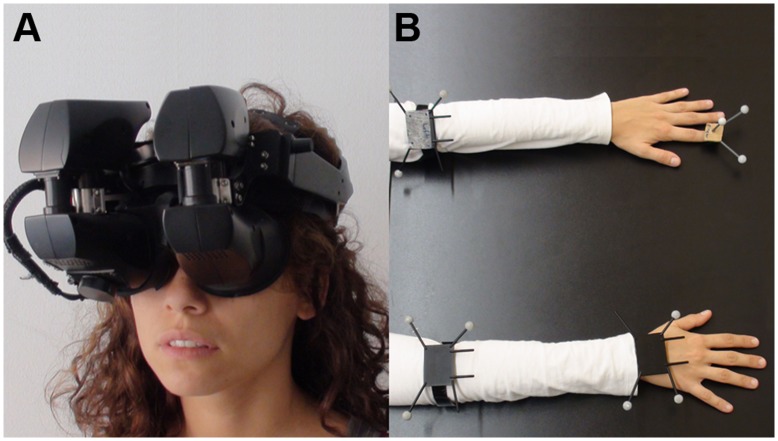
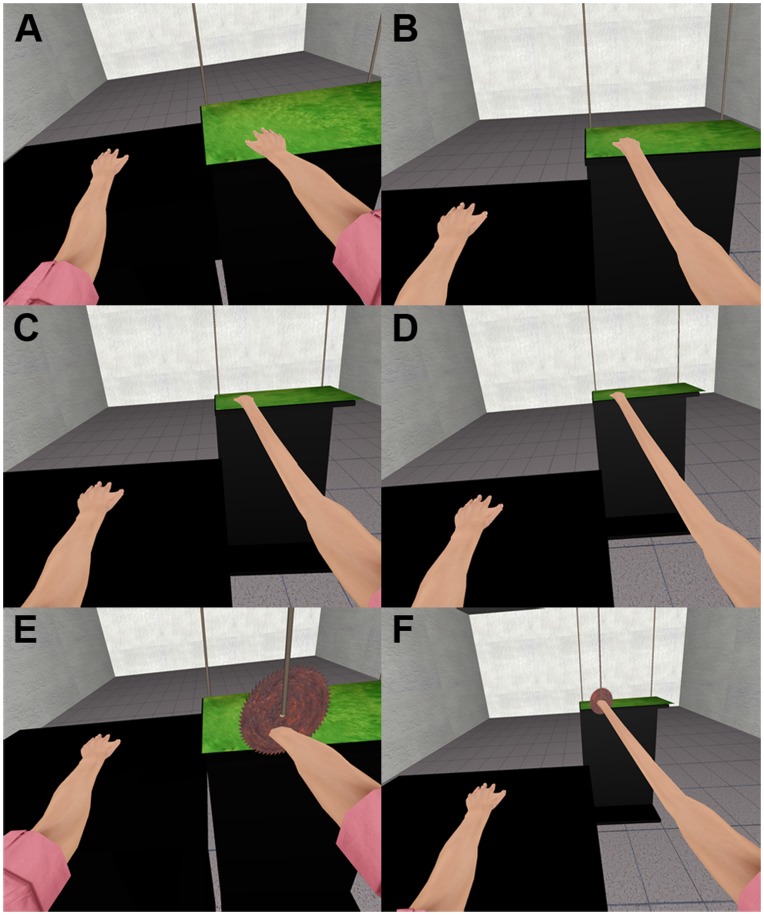
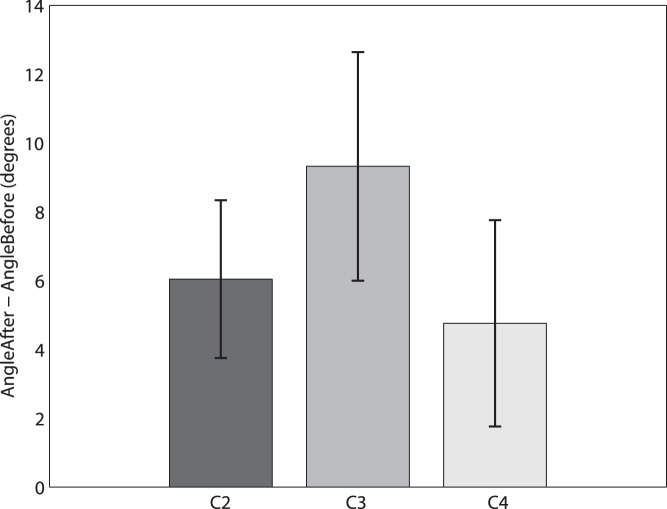
Recent studies have shown that a fake body part can be incorporated into human body representation through synchronous multisensory stimulation on the fake and corresponding real body part - the most famous example being the Rubber Hand Illusion. However, the extent to which gross asymmetries in the fake body can be assimilated remains unknown. Participants experienced, through a head-tracked stereo head-mounted display a virtual body coincident with their real body. There were 5 conditions in a between-groups experiment, with 10 participants per condition. In all conditions there was visuo-motor congruence between the real and virtual dominant arm. In an Incongruent condition (I), where the virtual arm length was equal to the real length, there was visuo-tactile incongruence. In four Congruent conditions there was visuo-tactile congruence, but the virtual arm lengths were either equal to (C1), double (C2), triple (C3) or quadruple (C4) the real ones. Questionnaire scores and defensive withdrawal movements in response to a threat showed that the overall level of ownership was high in both C1 and I, and there was no significant difference between these conditions. Additionally, participants experienced ownership over the virtual arm up to three times the length of the real one, and less strongly at four times the length. The illusion did decline, however, with the length of the virtual arm. In the C2-C4 conditions although a measure of proprioceptive drift positively correlated with virtual arm length, there was no correlation between the drift and ownership of the virtual arm, suggesting different underlying mechanisms between ownership and drift. Overall, these findings extend and enrich previous results that multisensory and sensorimotor information can reconstruct our perception of the body shape, size and symmetry even when this is not consistent with normal body proportions.
Conflict of interest statement
Figures





 and
and  are the dispersions in Control Time and Saw Time. The variable longerarm is the response on Q6, and anglediff is AngleBefore-AngleAfter. The paths represent the regression lines, where, for example,
are the dispersions in Control Time and Saw Time. The variable longerarm is the response on Q6, and anglediff is AngleBefore-AngleAfter. The paths represent the regression lines, where, for example,  where
where  The circles represent the random error terms and the corresponding numbers are the variances of the errors.
The circles represent the random error terms and the corresponding numbers are the variances of the errors.References
-
- Gallagher S. Philosophical conceptions of the self: Implications for cognitive science. Trends in Cogn Sci. 2000;4:14–21. - PubMed
-
- Tsakiris M, Prabhu G, Haggard P. Having a body versus moving your body: How agency structures body-ownership. Consciousness and Cognition. 2006;15:423–432. - PubMed
-
- Tsakiris M, Hesse MD, Boy C, Haggard P, Fink GR. Neural Signatures of Body Ownership: A Sensory Network for Bodily Self-Consciousness. Cereb Cortex. 2006. - PubMed
-
- Vallar G, Ronchi R. Somatoparaphrenia: a body delusion. A review of the neuropsychological literature. Experimental Brain Research. 2009;192:533–551. - PubMed
-
- Haggard P, Wolpert DM. Disorders of body schema. High-order motor disorders: from neuroanatomy and neurobiology to clinical neurology. 2005. pp. 261–271.
Publication types
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Miscellaneous
