

Embodied inference and spatial cognition
- PMID: 22843089
- PMCID: PMC3425745
- DOI: 10.1007/s10339-012-0519-z
Embodied inference and spatial cognition
Abstract
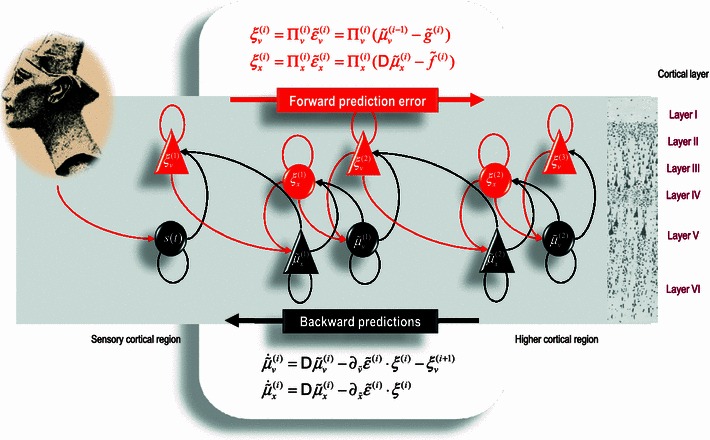
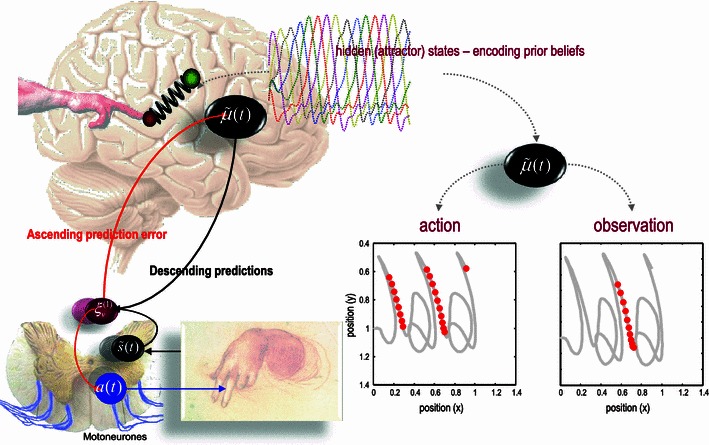
How much about our interactions with--and experience of--our world can be deduced from basic principles? This paper reviews recent attempts to understand the self-organised behaviour of embodied agents, like ourselves, as satisfying basic imperatives for sustained exchanges with the environment. In brief, one simple driving force appears to explain many aspects of perception, action and the perception of action. This driving force is the minimisation of surprise or prediction error, which--in the context of perception--corresponds to Bayes-optimal predictive coding (that suppresses exteroceptive prediction errors) and--in the context of action--reduces to classical motor reflexes (that suppress proprioceptive prediction errors). In what follows, we look at some of the phenomena that emerge from this single principle, such as the perceptual encoding of spatial trajectories that can both generate movement (of self) and recognise the movements (of others). These emergent behaviours rest upon prior beliefs about itinerant (wandering) states of the world--but where do these beliefs come from? In this paper, we focus on the nature of prior beliefs and how they underwrite the active sampling of a spatially extended sensorium. Put simply, to avoid surprising states of the world, it is necessary to minimise uncertainty about those states. When this minimisation is implemented via prior beliefs--about how we sample the world--the resulting behaviour is remarkably reminiscent of searches seen in foraging or visual searches with saccadic eye movements.
Figures

References
-
- Barlow H. Possible principles underlying the transformations of sensory messages. In: Rosenblith W, editor. Sensory communication. Cambridge: MIT Press; 1961. pp. 217–234.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
