

Structural learning in feedforward and feedback control
- PMID: 22896725
- PMCID: PMC3545174
- DOI: 10.1152/jn.00315.2012
Structural learning in feedforward and feedback control
Abstract
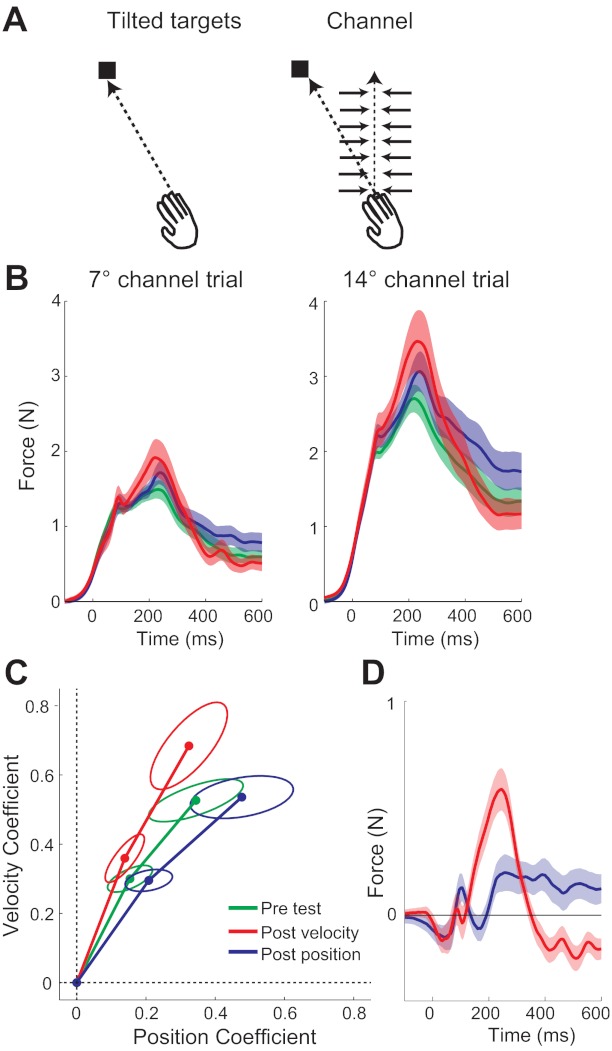
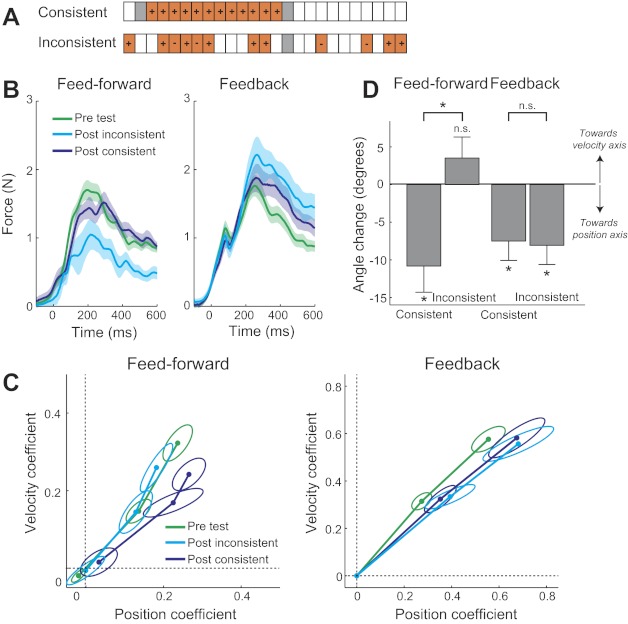
For smooth and efficient motor control, the brain needs to make fast corrections during the movement to resist possible perturbations. It also needs to adapt subsequent movements to improve future performance. It is important that both feedback corrections and feedforward adaptation need to be made based on noisy and often ambiguous sensory data. Therefore, the initial response of the motor system, both for online corrections and adaptive responses, is guided by prior assumptions about the likely structure of perturbations. In the context of correcting and adapting movements perturbed by a force field, we asked whether these priors are hard wired or whether they can be modified through repeated exposure to differently shaped force fields. We found that both feedback corrections to unexpected perturbations and feedforward adaptation to a new force field changed, such that they were appropriate to counteract the type of force field that participants had experienced previously. We then investigated whether these changes were driven by a common mechanism or by two separate mechanisms. Participants experienced force fields that were either temporally consistent, causing sustained adaptation, or temporally inconsistent, causing little overall adaptation. We found that the consistent force fields modified both feedback and feedforward responses. In contrast, the inconsistent force field modified the temporal shape of feedback corrections but not of the feedforward adaptive response. These results indicate that responses to force perturbations can be modified in a structural manner and that these modifications are at least partly dissociable for feedback and feedforward control.
Figures
References
-
- Astrom KJ, Wittenmark B. Adaptive Control. Reading, MA: Addison-Wesley, 1995
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources