

Estimates of acausal joint impedance models
- PMID: 22907963
- PMCID: PMC3601445
- DOI: 10.1109/TBME.2012.2213339
Estimates of acausal joint impedance models
Abstract
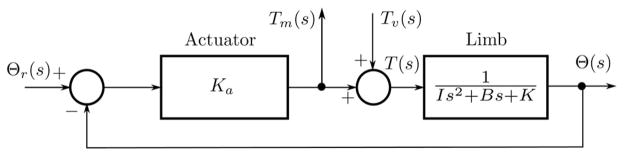
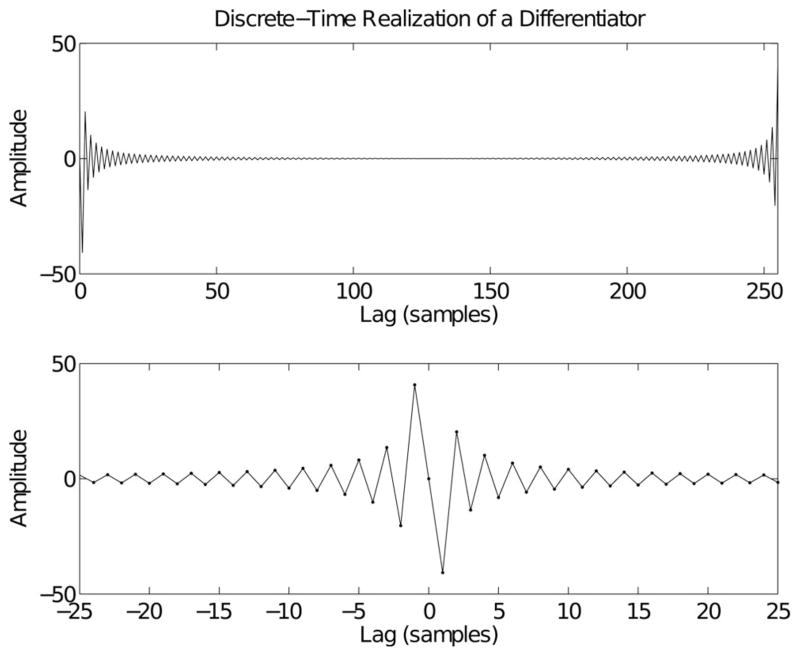
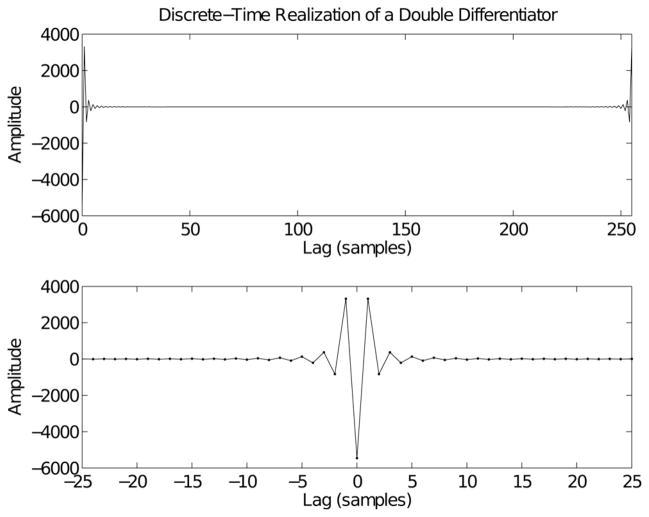
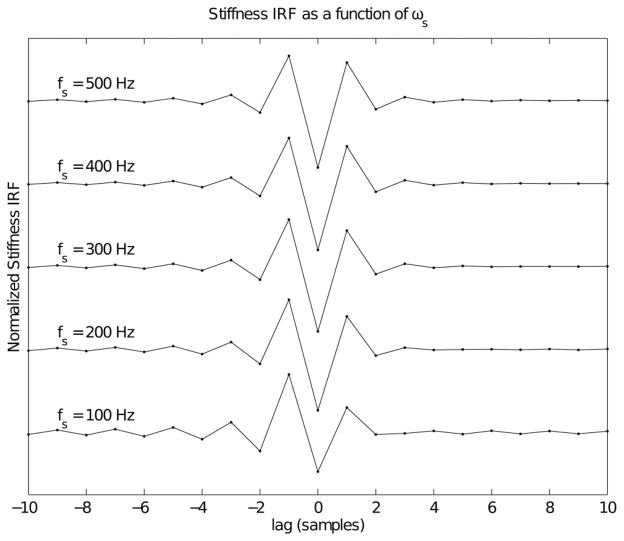
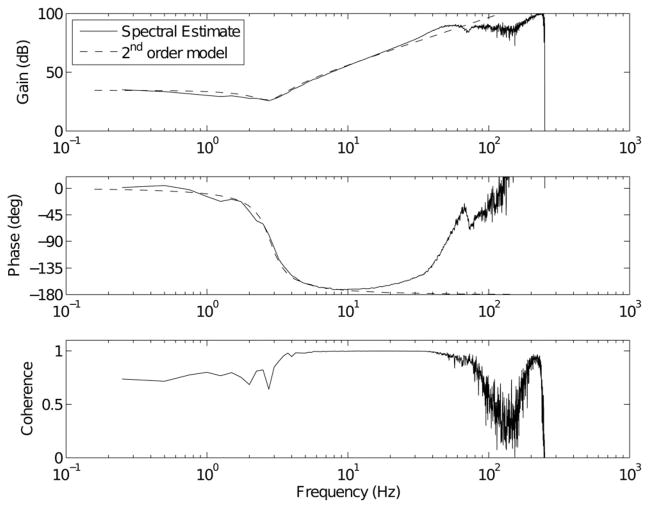
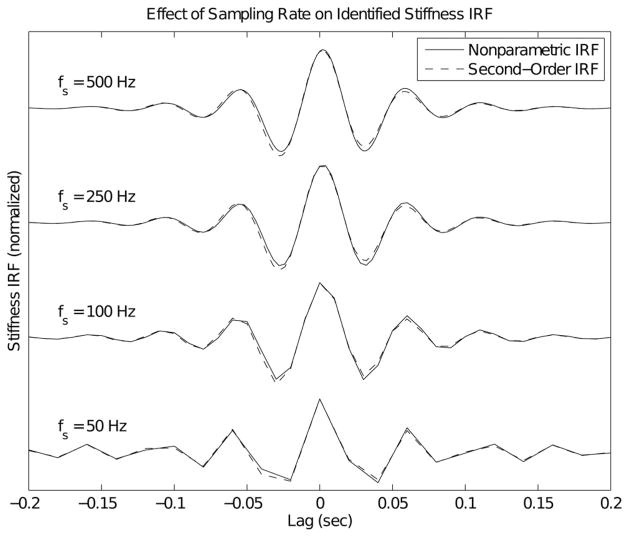
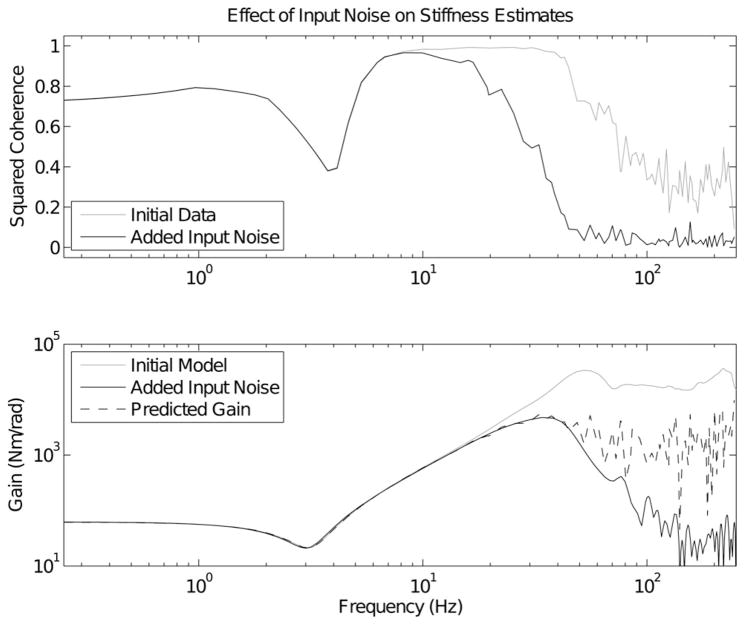
Estimates of joint or limb impedance are commonly used in the study of how the nervous system controls posture and movement, and how that control is altered by injury to the neural or musculoskeletal systems. Impedance characterizes the dynamic relationship between an imposed perturbation of joint position and the torques generated in response. While there are many practical reasons for estimating impedance rather than its inverse, admittance, it is an acausal representation of the limb mechanics that can lead to difficulties in interpretation or use. The purpose of this study was to explore the acausal nature of nonparametric estimates of joint impedance representations to determine how they are influenced by common experimental and computational choices. This was accomplished by deriving discrete-time realizations of first- and second-order derivatives to illustrate two key difficulties in the physical interpretation of impedance impulse response functions. These illustrations were provided using both simulated and experimental data. It was found that the shape of the impedance impulse response depends critically on the selected sampling rate, and on the bandwidth and noise characteristics of the position perturbation used during the estimation process. These results provide important guidelines for designing experiments in which nonparametric estimates of impedance will be obtained, especially when those estimates are to be used in a multistep identification process.
Figures

Similar articles
-
Passive Stiffness Reduction in Human Ankle Joint Mechanical Impedance When Exposed to Externally Imposed Movement.IEEE Int Conf Rehabil Robot. 2019 Jun;2019:127-131. doi: 10.1109/ICORR.2019.8779490. IEEE Int Conf Rehabil Robot. 2019. PMID: 31374618
-
Comparative analysis of methods for estimating arm segment parameters and joint torques from inverse dynamics.J Biomech Eng. 2011 Mar;133(3):031003. doi: 10.1115/1.4003308. J Biomech Eng. 2011. PMID: 21303179
-
Subspace methods for identification of human ankle joint stiffness.IEEE Trans Biomed Eng. 2011 Nov;58(11):3039-48. doi: 10.1109/TBME.2010.2092430. Epub 2010 Nov 15. IEEE Trans Biomed Eng. 2011. PMID: 21078569
-
Estimation of joint stiffness with a compliant load.Annu Int Conf IEEE Eng Med Biol Soc. 2009;2009:2967-70. doi: 10.1109/IEMBS.2009.5332496. Annu Int Conf IEEE Eng Med Biol Soc. 2009. PMID: 19963548
-
Closed-loop identification: application to the estimation of limb impedance in a compliant environment.IEEE Trans Biomed Eng. 2011 Mar;58(3):521-30. doi: 10.1109/TBME.2010.2096424. Epub 2010 Dec 3. IEEE Trans Biomed Eng. 2011. PMID: 21134808 Free PMC article.
Cited by
-
System identification of physiological systems using short data segments.IEEE Trans Biomed Eng. 2012 Dec;59(12):3541-9. doi: 10.1109/TBME.2012.2220767. Epub 2012 Sep 28. IEEE Trans Biomed Eng. 2012. PMID: 23033429 Free PMC article.
-
Mechanisms contributing to reduced knee stiffness during movement.Exp Brain Res. 2017 Oct;235(10):2959-2970. doi: 10.1007/s00221-017-5032-2. Epub 2017 Jul 15. Exp Brain Res. 2017. PMID: 28712015 Free PMC article.
-
Leveraging Joint Mechanics Simplifies the Neural Control of Movement.Front Integr Neurosci. 2022 Mar 21;16:802608. doi: 10.3389/fnint.2022.802608. eCollection 2022. Front Integr Neurosci. 2022. PMID: 35387200 Free PMC article.
References
-
- Agarwal G, Gottlieb G. Mathematical modeling and simulation of the postural control loop—Part I. CRC Crit Rev Biomed Eng. 1982;8(1):93–134. - PubMed
-
- Cannon S, Zahalak G. The mechanical behavior of active human skeletal muscle in small oscillations. J Biomech. 1982;15(2):111–121. - PubMed
-
- Sinkjaer T, Toft E, Andreassen S, Hornemann B. Muscle stiffness in human ankle dorsiflexors: intrinsic and reflex components. J Neurophysiol. 1988;60(3):1110–1121. - PubMed
-
- Kearney R, Hunter I. System identification of human joint dynamics. CRC Crit Rev Biomed Eng. 1990;18:55–87. - PubMed
-
- Tsuji T, Morasso P, Goto K, Ito K. Human hand impedance characteristics during maintained posture. Biol Cybern. 1995 May;72(6):475–485. - PubMed
