

Variable-State-Dimension Kalman-based Filter for orientation determination using inertial and magnetic sensors
- PMID: 23012502
- PMCID: PMC3444060
- DOI: 10.3390/s120708491
Variable-State-Dimension Kalman-based Filter for orientation determination using inertial and magnetic sensors
Abstract
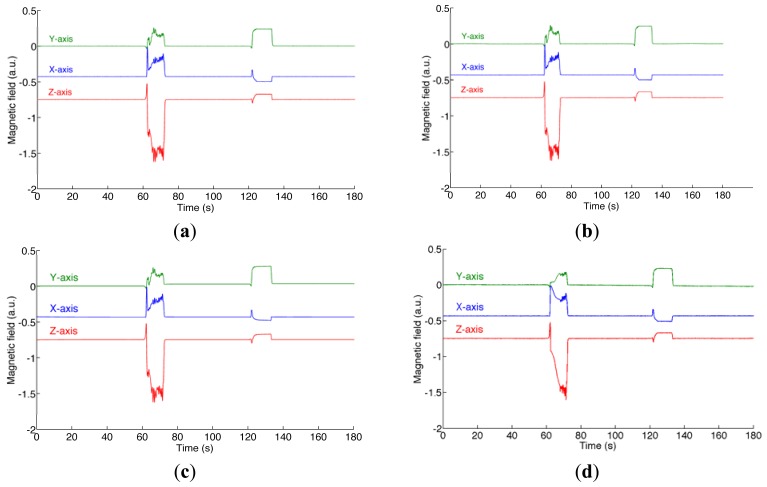
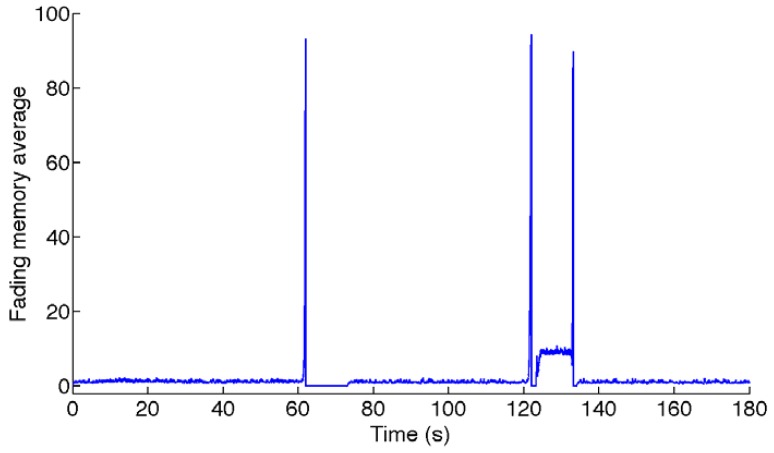
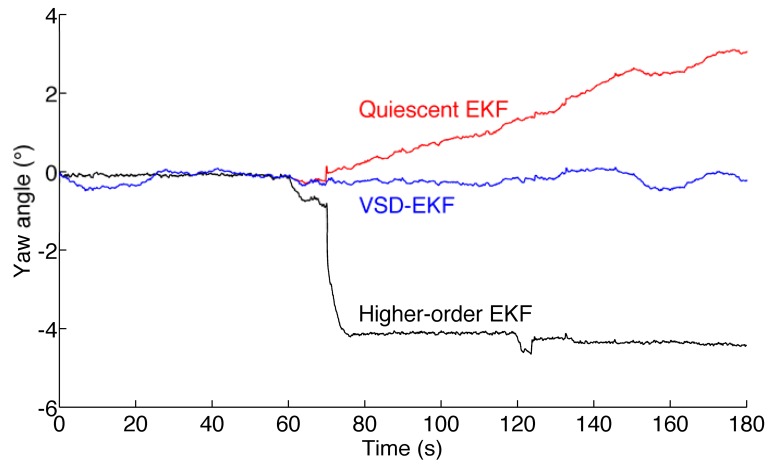
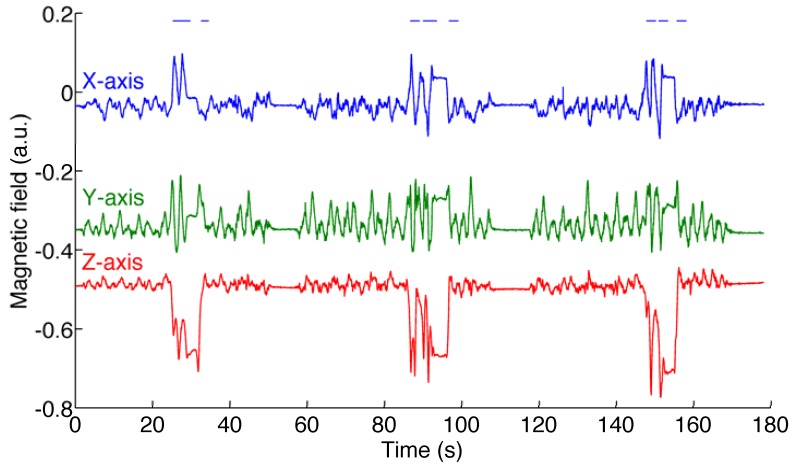
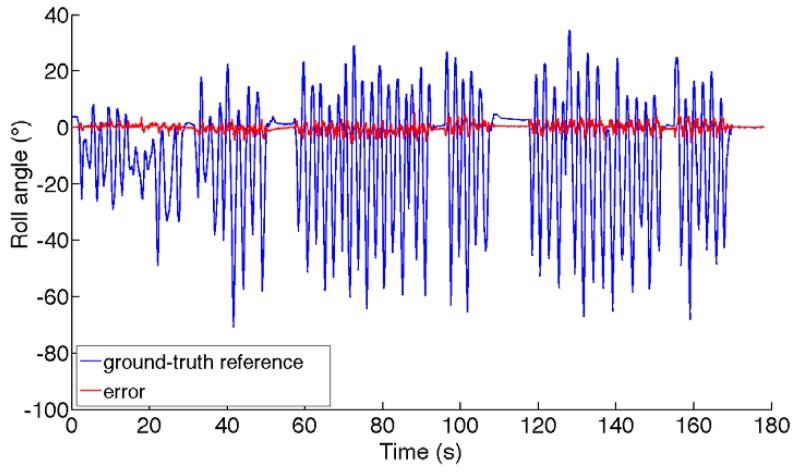
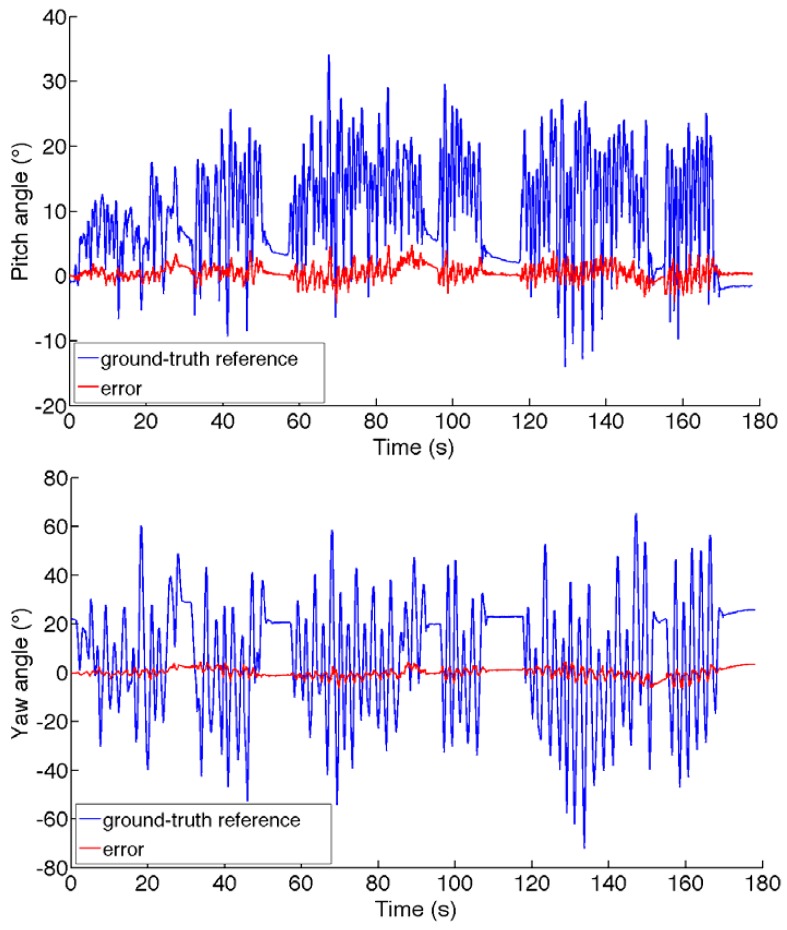
In this paper a quaternion-based Variable-State-Dimension Extended Kalman Filter (VSD-EKF) is developed for estimating the three-dimensional orientation of a rigid body using the measurements from an Inertial Measurement Unit (IMU) integrated with a triaxial magnetic sensor. Gyro bias and magnetic disturbances are modeled and compensated by including them in the filter state vector. The VSD-EKF switches between a quiescent EKF, where the magnetic disturbance is modeled as a first-order Gauss-Markov stochastic process (GM-1), and a higher-order EKF where extra state components are introduced to model the time-rate of change of the magnetic field as a GM-1 stochastic process, namely the magnetic disturbance is modeled as a second-order Gauss-Markov stochastic process (GM-2). Experimental validation tests show the effectiveness of the VSD-EKF, as compared to either the quiescent EKF or the higher-order EKF when they run separately.
Keywords: Kalman filters; inertial/magnetic sensing; orientation determination; sensor fusion.
Figures
References
-
- Foxlin E. Motion Tracking Requirements and Technologies. In: Stanney K.M., editor. Handbook of Virtual Environments: Design, Implementation, and Applications. Lawrence Erlbaum Associates; Mahwah, NJ, USA: 2002. pp. 163–210.
-
- Roetenberg D., Luinge H.J., Baten C.T.M., Veltink P.H. Compensation of magnetic disturbances improves inertial and magnetic sensing of human body segment orientation. IEEE Trans. Neural Syst. Rehabil. Eng. 2005;13:395–405. - PubMed
-
- Foxlin E. Pedestrian tracking with shoe-mounted inertial sensors. IEEE Comput. Graph. Appl. 2005;25:38–46. - PubMed
-
- Welch G.F., Foxlin E. Motion tracking: No silver bullet, but a respectable arsenal. IEEE Comput. Graph. Appl. 2002;22:24–38.
-
- Sabatini A.M. Inertial Sensing in Biomechanics: A Survey of Computational Techniques Bridging Motion Analysis and Personal Navigation. In: Begg R., Palaniswami M., editors. Computational Intelligence for Movement Sciences, Neural Networks and other Emerging Techniques. IGP Idea Group Publishing; Hershey PA, USA: 2006. pp. 70–100.
LinkOut - more resources
Full Text Sources
Other Literature Sources
