

Deciphering interactions in moving animal groups
- PMID: 23028277
- PMCID: PMC3441504
- DOI: 10.1371/journal.pcbi.1002678
Deciphering interactions in moving animal groups
Abstract
Collective motion phenomena in large groups of social organisms have long fascinated the observer, especially in cases, such as bird flocks or fish schools, where large-scale highly coordinated actions emerge in the absence of obvious leaders. However, the mechanisms involved in this self-organized behavior are still poorly understood, because the individual-level interactions underlying them remain elusive. Here, we demonstrate the power of a bottom-up methodology to build models for animal group motion from data gathered at the individual scale. Using video tracks of fish shoal in a tank, we show how a careful, incremental analysis at the local scale allows for the determination of the stimulus/response function governing an individual's moving decisions. We find in particular that both positional and orientational effects are present, act upon the fish turning speed, and depend on the swimming speed, yielding a novel schooling model whose parameters are all estimated from data. Our approach also leads to identify a density-dependent effect that results in a behavioral change for the largest groups considered. This suggests that, in confined environment, the behavioral state of fish and their reaction patterns change with group size. We debate the applicability, beyond the particular case studied here, of this novel framework for deciphering interactions in moving animal groups.
Conflict of interest statement
The authors have declared that no competing interests exist.
Figures
 , where
, where  is the heading of fish
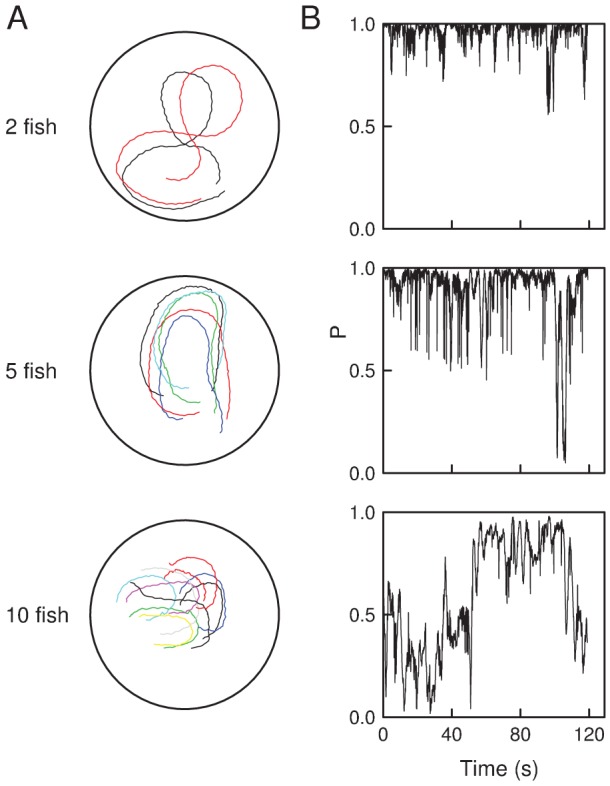
is the heading of fish  . In groups of
. In groups of  , fast swimming fish are nearly perfectly aligned at all times, whereas in larger groups, the alignment is interspersed by desynchronization events.
, fast swimming fish are nearly perfectly aligned at all times, whereas in larger groups, the alignment is interspersed by desynchronization events.
 separates the position of the focal fish
separates the position of the focal fish  from its current point of impact on the wall;
from its current point of impact on the wall;  is the angle between the heading of fish
is the angle between the heading of fish  and the angular position of this point of impact with respect to the center of the tank. Neighboring fish
and the angular position of this point of impact with respect to the center of the tank. Neighboring fish  is at distance
is at distance  from fish
from fish  ;
;  is the angle between the angular position of fish
is the angle between the angular position of fish  with respect to fish
with respect to fish  and the heading of fish
and the heading of fish  . The relative heading of fish
. The relative heading of fish  compared to the focal fish
compared to the focal fish  is
is  . (B) Illustration of a Voronoi neighborhood. Fish headings are indicated by arrows. The focal fish is under the influence of its five neighbors in the Voronoi tessellation (dotted lines), one of which is near the tank wall.
. (B) Illustration of a Voronoi neighborhood. Fish headings are indicated by arrows. The focal fish is under the influence of its five neighbors in the Voronoi tessellation (dotted lines), one of which is near the tank wall.
 ,
,  ,
,  ,
,  and
and  were estimated for each fish separately, and are reported as a function of fish speed (one color per replicate). This reveals the functional dependence of each parameter on the swimming speed
were estimated for each fish separately, and are reported as a function of fish speed (one color per replicate). This reveals the functional dependence of each parameter on the swimming speed  . (B) Time series of the alignment between two fish (
. (B) Time series of the alignment between two fish ( ) for each experiment (left) and corresponding model simulations (right), ordered by increasing fish speed. Speed is expressed in fish body lengths per second. (C) Comparison between model predictions and experimental data for the time-averaged alignment (
) for each experiment (left) and corresponding model simulations (right), ordered by increasing fish speed. Speed is expressed in fish body lengths per second. (C) Comparison between model predictions and experimental data for the time-averaged alignment ( ) and time-averaged distance (
) and time-averaged distance ( ) between the two fish as function of swimming speed (color dots : data points, same colors as in A. Red line: predicted mean and gray area : 95% quantiles (see Model Validation)).
) between the two fish as function of swimming speed (color dots : data points, same colors as in A. Red line: predicted mean and gray area : 95% quantiles (see Model Validation)).
 ,
,  ,
,  ,
,  and
and  are reported for each replicate, as a function of group size. The first shell of Voronoi neighbors was used. The three parameters reflecting the autonomous part of the behavior (
are reported for each replicate, as a function of group size. The first shell of Voronoi neighbors was used. The three parameters reflecting the autonomous part of the behavior ( : persistence length,
: persistence length,  : variance of noise and
: variance of noise and  : wall avoidance strength) do not show systematic variations with group size. Interaction strength parameters (
: wall avoidance strength) do not show systematic variations with group size. Interaction strength parameters ( : positional interaction,
: positional interaction,  : orientational interaction) clearly decrease with group size. (B) Comparisons between model predictions and experimental data using the replicate-based parameters found in A. Left: global polarization
: orientational interaction) clearly decrease with group size. (B) Comparisons between model predictions and experimental data using the replicate-based parameters found in A. Left: global polarization  , Right: mean inter-individual distance
, Right: mean inter-individual distance  (in meters). (Red circles: data, horizontal bars: predicted means, vertical bars:
(in meters). (Red circles: data, horizontal bars: predicted means, vertical bars:  confidence interval, dotted line: predictions under the null model with no interactions). Model predictions were computed by averaging
confidence interval, dotted line: predictions under the null model with no interactions). Model predictions were computed by averaging  different numerical simulation (with Euler timestepping) for each replicate, starting from the experimental initial conditions, see Model Predictions.
different numerical simulation (with Euler timestepping) for each replicate, starting from the experimental initial conditions, see Model Predictions.References
-
- Parrish JK, Edelstein-Keshet L (1999) Complexity, pattern, and evolutionary trade-offs in animal aggregation. Science 284: 99–101. - PubMed
-
- Parrish JK, Hamner WM (1997) Animal Groups in Three Dimensions. Cambridge: Cambridge University Press. 384 p.
-
- Ben-Jacob E, Cohen I, Levine H (2000) Cooperative self-organization of microorganisms. Adv Phys 49: 395–554.
-
- Camazine S, Deneubourg JL, Franks NR, Sneyd J, Theraulaz G, et al.. (2001) Self-Organization in Biological Systems. Princeton: Princeton University Press. 560 p.
-
- Sumpter DJT (2010) Collective Animal Behavior. Princeton: Princeton University Press. 302 p.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
