

A model of reward- and effort-based optimal decision making and motor control
- PMID: 23055916
- PMCID: PMC3464194
- DOI: 10.1371/journal.pcbi.1002716
A model of reward- and effort-based optimal decision making and motor control
Abstract
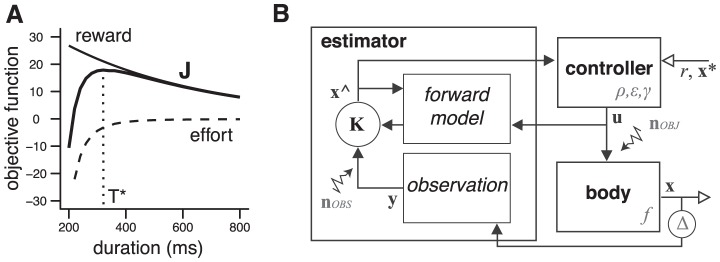
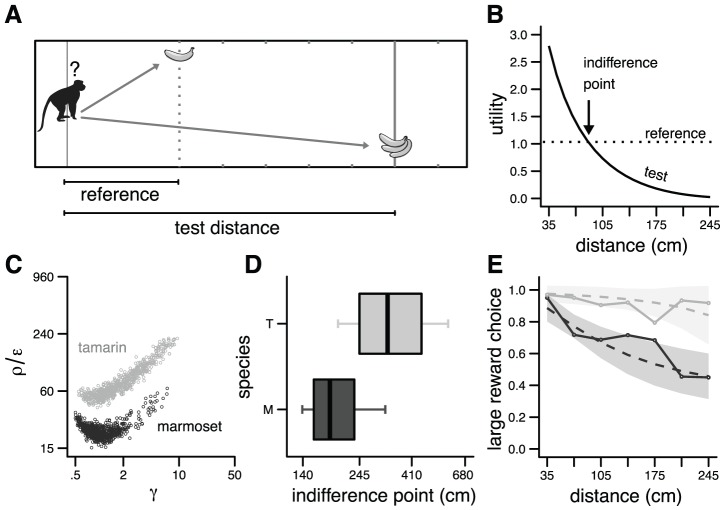
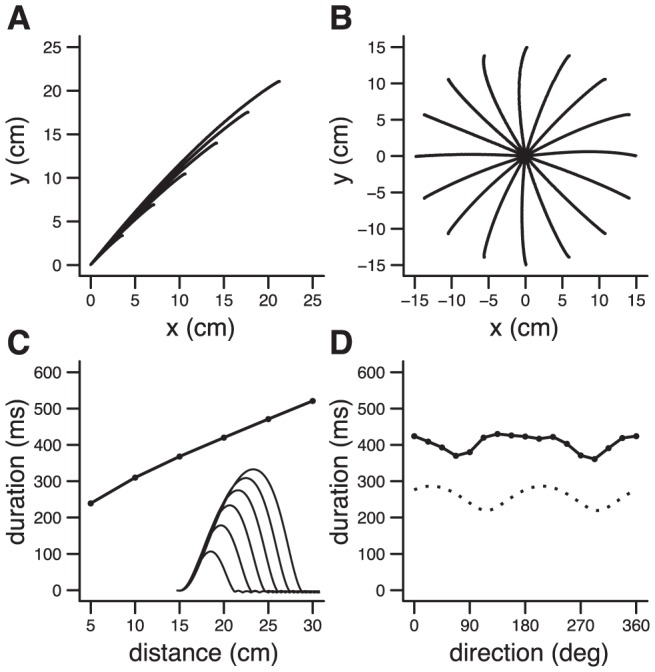
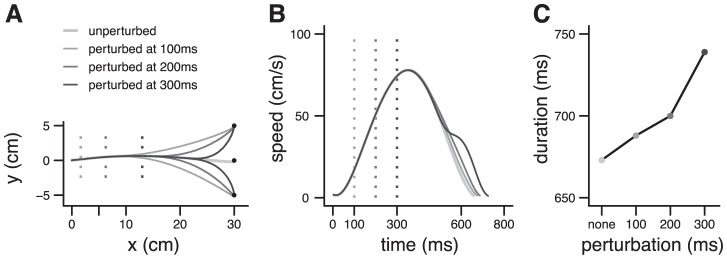
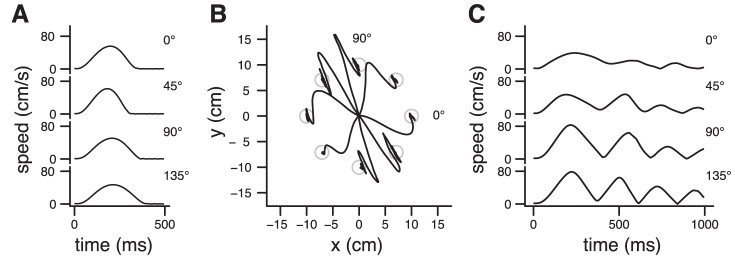
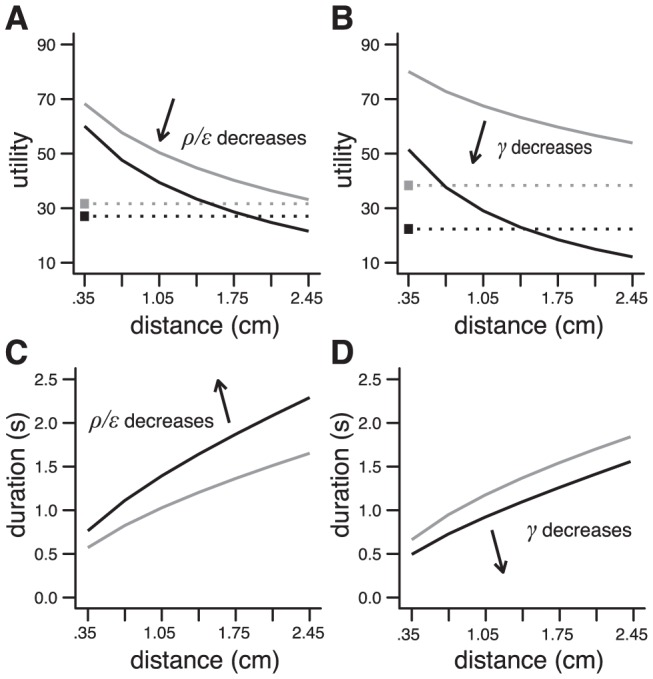
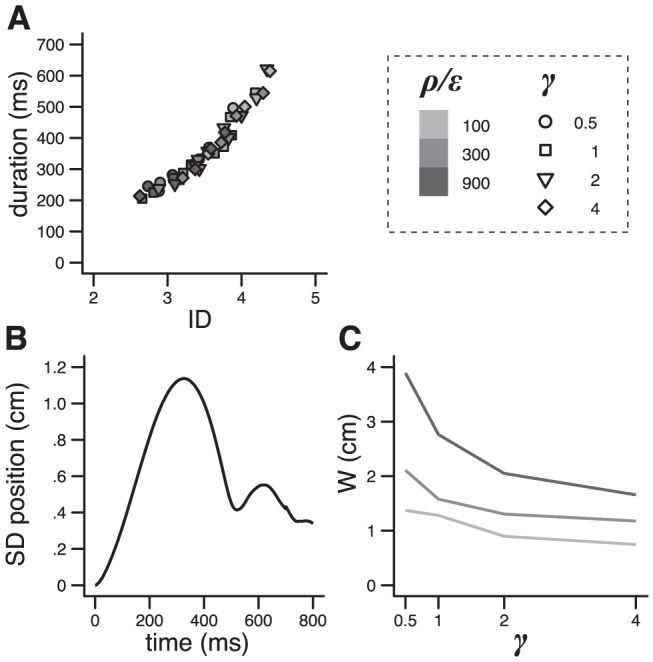
Costs (e.g. energetic expenditure) and benefits (e.g. food) are central determinants of behavior. In ecology and economics, they are combined to form a utility function which is maximized to guide choices. This principle is widely used in neuroscience as a normative model of decision and action, but current versions of this model fail to consider how decisions are actually converted into actions (i.e. the formation of trajectories). Here, we describe an approach where decision making and motor control are optimal, iterative processes derived from the maximization of the discounted, weighted difference between expected rewards and foreseeable motor efforts. The model accounts for decision making in cost/benefit situations, and detailed characteristics of control and goal tracking in realistic motor tasks. As a normative construction, the model is relevant to address the neural bases and pathological aspects of decision making and motor control.
Conflict of interest statement
The authors have declared that no competing interests exist.
Figures
References
-
- Stephens DW, Krebs JR (1986) Foraging Theory. Princeton, NJ: Princeton University Press. 262 p.
-
- Denk F, Walton ME, Jennings KA, Sharp T, Rushworth MF, et al. (2005) Differential involvement of serotonin and dopamine systems in cost-benefit decisions about delay or effort. Psychopharmacology (Berl) 179: 587–596. - PubMed
-
- Rudebeck PH, Walton ME, Smyth AN, Bannerman DM, Rushworth MF (2006) Separate neural pathways process different decision costs. Nat Neurosci 9: 1161–1168. - PubMed
MeSH terms
LinkOut - more resources
Full Text Sources
Research Materials
