

Proprioceptive feedback and brain computer interface (BCI) based neuroprostheses
- PMID: 23071707
- PMCID: PMC3465309
- DOI: 10.1371/journal.pone.0047048
Proprioceptive feedback and brain computer interface (BCI) based neuroprostheses
Abstract
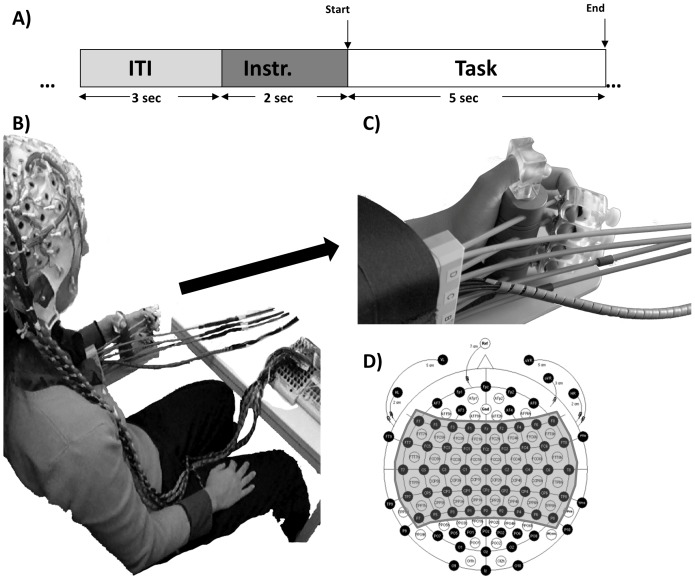
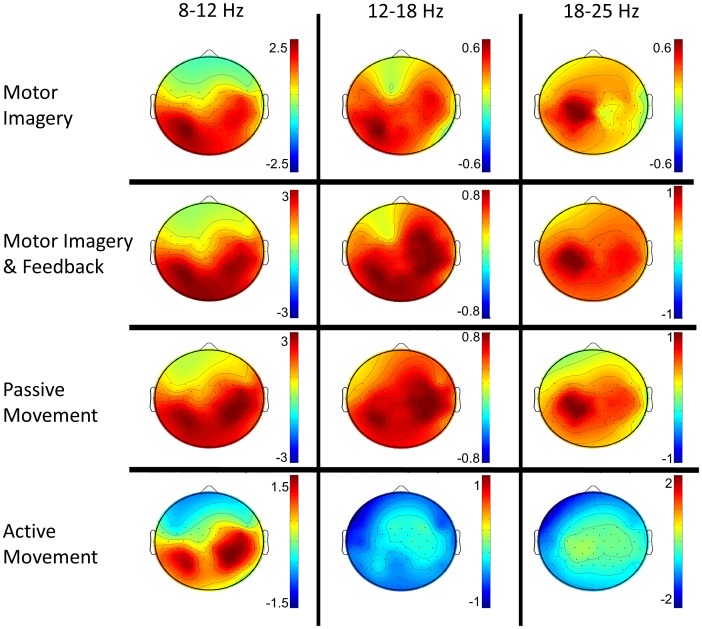
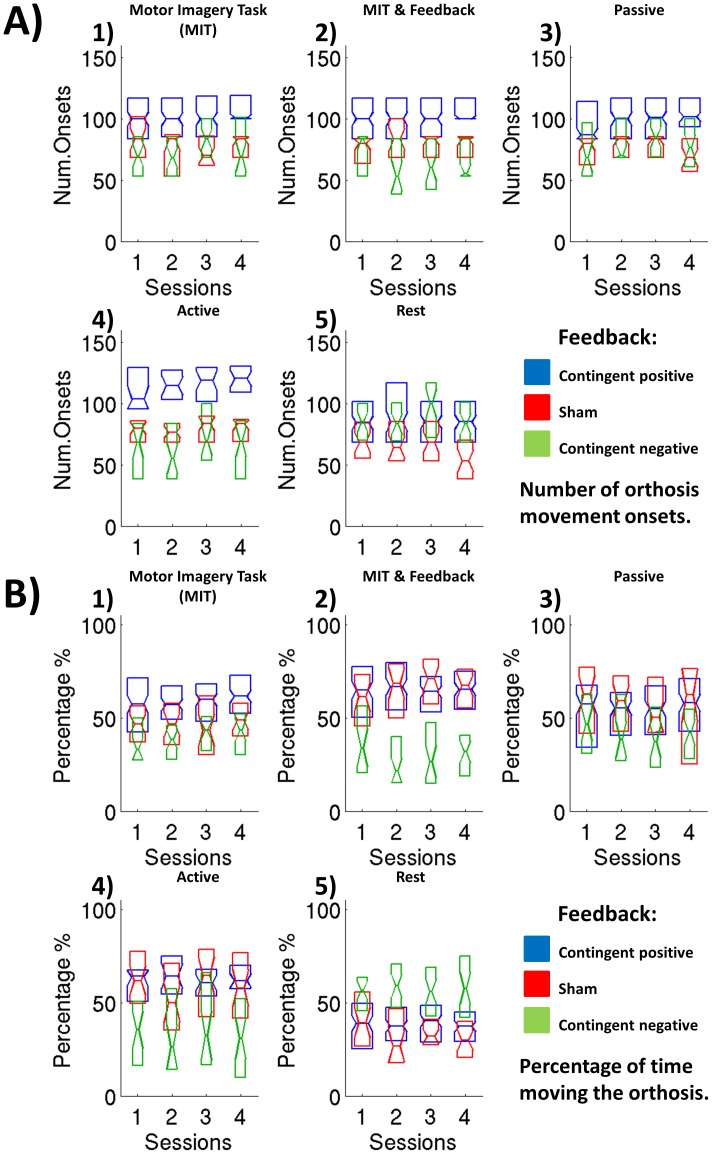
Brain computer interface (BCI) technology has been proposed for motor neurorehabilitation, motor replacement and assistive technologies. It is an open question whether proprioceptive feedback affects the regulation of brain oscillations and therefore BCI control. We developed a BCI coupled on-line with a robotic hand exoskeleton for flexing and extending the fingers. 24 healthy participants performed five different tasks of closing and opening the hand: (1) motor imagery of the hand movement without any overt movement and without feedback, (2) motor imagery with movement as online feedback (participants see and feel their hand, with the exoskeleton moving according to their brain signals, (3) passive (the orthosis passively opens and closes the hand without imagery) and (4) active (overt) movement of the hand and rest. Performance was defined as the difference in power of the sensorimotor rhythm during motor task and rest and calculated offline for different tasks. Participants were divided in three groups depending on the feedback receiving during task 2 (the other tasks were the same for all participants). Group 1 (n = 9) received contingent positive feedback (participants' sensorimotor rhythm (SMR) desynchronization was directly linked to hand orthosis movements), group 2 (n = 8) contingent "negative" feedback (participants' sensorimotor rhythm synchronization was directly linked to hand orthosis movements) and group 3 (n = 7) sham feedback (no link between brain oscillations and orthosis movements). We observed that proprioceptive feedback (feeling and seeing hand movements) improved BCI performance significantly. Furthermore, in the contingent positive group only a significant motor learning effect was observed enhancing SMR desynchronization during motor imagery without feedback in time. Furthermore, we observed a significantly stronger SMR desynchronization in the contingent positive group compared to the other groups during active and passive movements. To summarize, we demonstrated that the use of contingent positive proprioceptive feedback BCI enhanced SMR desynchronization during motor tasks.
Conflict of interest statement
Figures
Similar articles
-
Brain oscillatory signatures of motor tasks.J Neurophysiol. 2015 Jun 1;113(10):3663-82. doi: 10.1152/jn.00467.2013. Epub 2015 Mar 25. J Neurophysiol. 2015. PMID: 25810484 Free PMC article.
-
The effects of handedness on sensorimotor rhythm desynchronization and motor-imagery BCI control.Sci Rep. 2020 Feb 7;10(1):2087. doi: 10.1038/s41598-020-59222-w. Sci Rep. 2020. PMID: 32034277 Free PMC article.
-
Oscillatory entrainment of the motor cortical network during motor imagery is modulated by the feedback modality.Neuroimage. 2015 May 1;111:1-11. doi: 10.1016/j.neuroimage.2015.01.058. Epub 2015 Feb 7. Neuroimage. 2015. PMID: 25665968
-
What External Variables Affect Sensorimotor Rhythm Brain-Computer Interface (SMR-BCI) Performance?HCA Healthc J Med. 2021 Jun 28;2(3):143-162. doi: 10.36518/2689-0216.1188. eCollection 2021. HCA Healthc J Med. 2021. PMID: 37427002 Free PMC article. Review.
-
Brain-computer interface robotics for hand rehabilitation after stroke: a systematic review.J Neuroeng Rehabil. 2021 Jan 23;18(1):15. doi: 10.1186/s12984-021-00820-8. J Neuroeng Rehabil. 2021. PMID: 33485365 Free PMC article.
Cited by
-
Directional Decoding From EEG in a Center-Out Motor Imagery Task With Visual and Vibrotactile Guidance.Front Hum Neurosci. 2021 Sep 24;15:687252. doi: 10.3389/fnhum.2021.687252. eCollection 2021. Front Hum Neurosci. 2021. PMID: 34630055 Free PMC article.
-
Challenges of neural interfaces for stroke motor rehabilitation.Front Hum Neurosci. 2023 Sep 18;17:1070404. doi: 10.3389/fnhum.2023.1070404. eCollection 2023. Front Hum Neurosci. 2023. PMID: 37789905 Free PMC article.
-
Cortical Proprioceptive Processing Is Altered by Aging.Front Aging Neurosci. 2018 Jun 14;10:147. doi: 10.3389/fnagi.2018.00147. eCollection 2018. Front Aging Neurosci. 2018. PMID: 29962945 Free PMC article.
-
Comparative Study of SSVEP- and P300-Based Models for the Telepresence Control of Humanoid Robots.PLoS One. 2015 Nov 12;10(11):e0142168. doi: 10.1371/journal.pone.0142168. eCollection 2015. PLoS One. 2015. PMID: 26562524 Free PMC article.
-
Real-Time Control of a Neuroprosthetic Hand by Magnetoencephalographic Signals from Paralysed Patients.Sci Rep. 2016 Feb 24;6:21781. doi: 10.1038/srep21781. Sci Rep. 2016. PMID: 26904967 Free PMC article.
References
-
- Birbaumer N, Ramos-Murguialday A, Cohen L (2008) Brain-computer interface in paralysis. Curr Opin Neurol 21: 634–638. - PubMed
-
- de Vries S, Mulder T (2007) Motor imagery and stroke rehabilitation: a critical discussion. J Rehabil Med 39: 5–13. - PubMed
-
- Volpe BT, Krebs HI, Hogan N, Edelstein OL, Diels C, et al. (2000) A novel approach to stroke rehabilitation: robot-aided sensorimotor stimulation. Neurology 54: 1938–1944. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Medical
