

Stereoscopy and the Human Visual System
- PMID: 23144596
- PMCID: PMC3490636
- DOI: 10.5594/j18173
Stereoscopy and the Human Visual System
Abstract
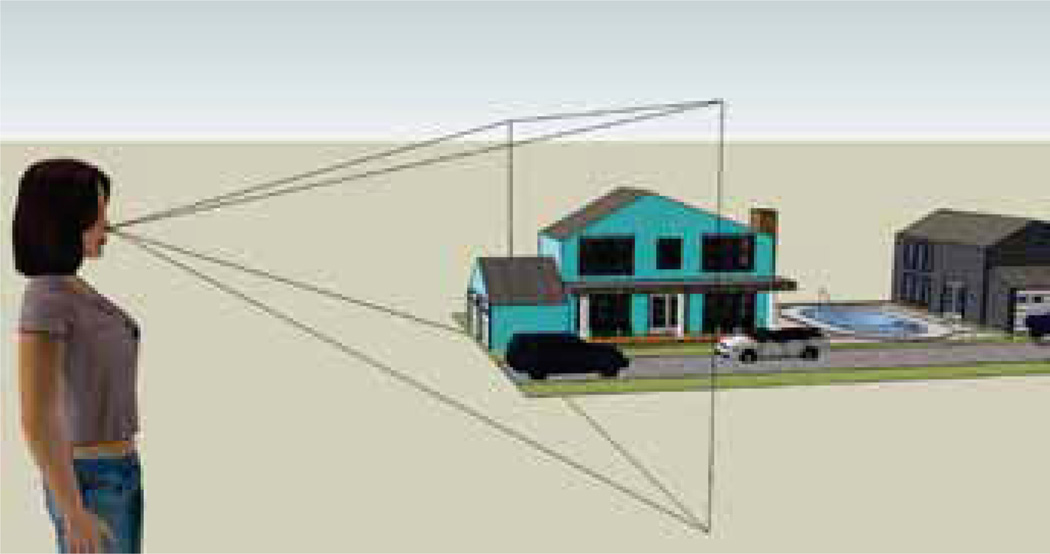
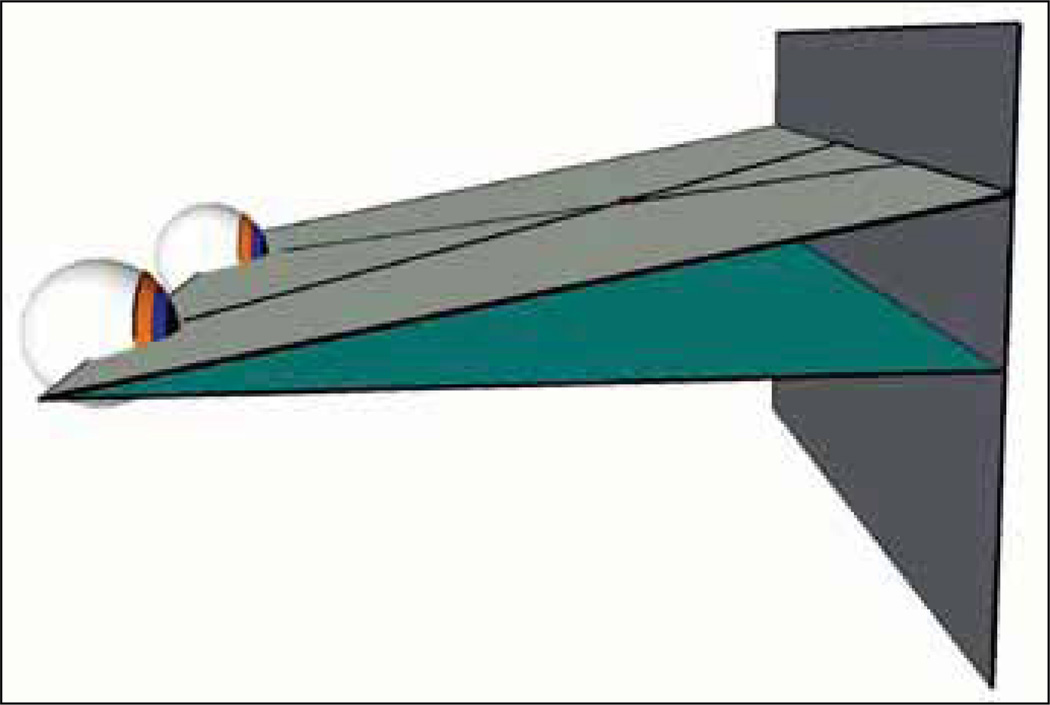
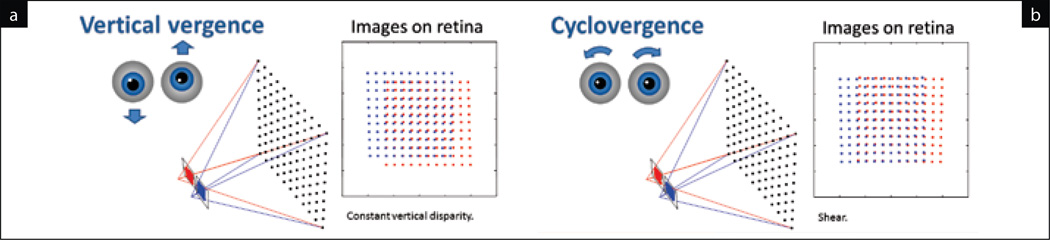
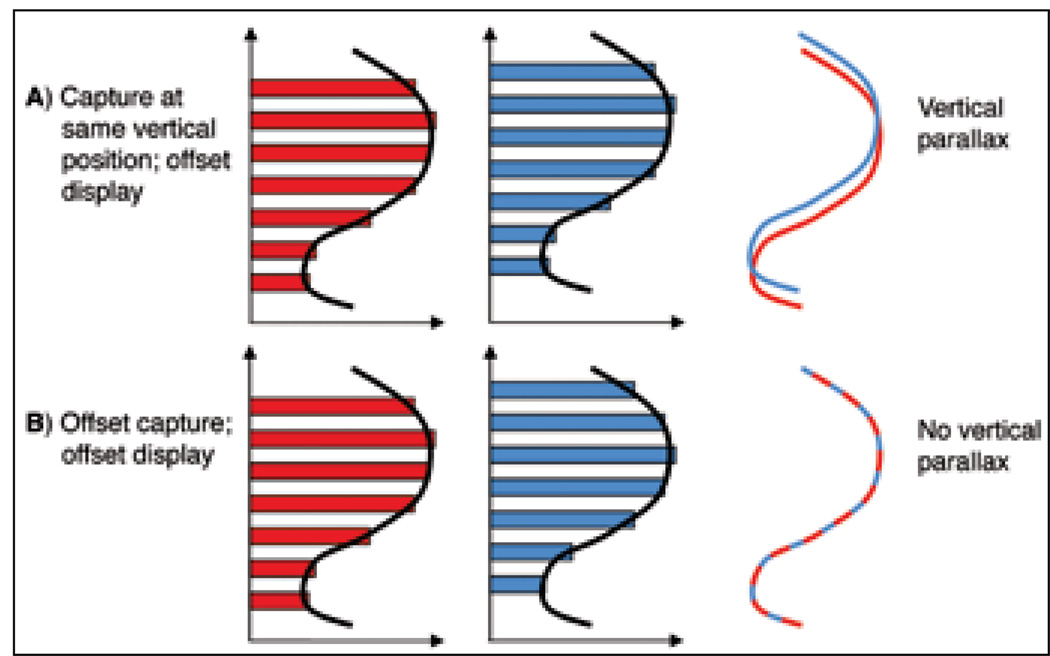
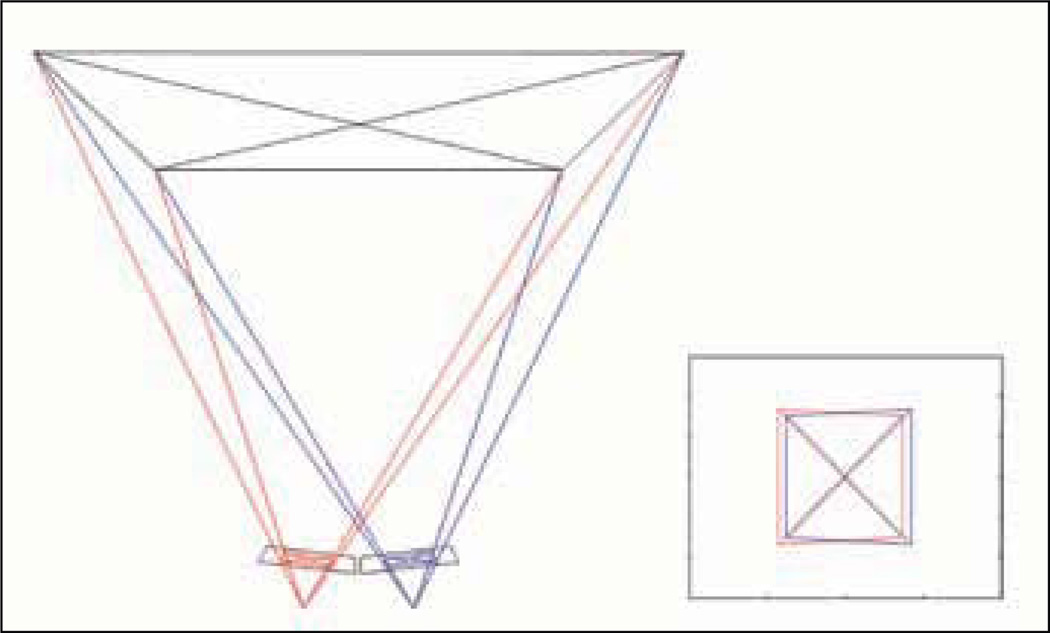
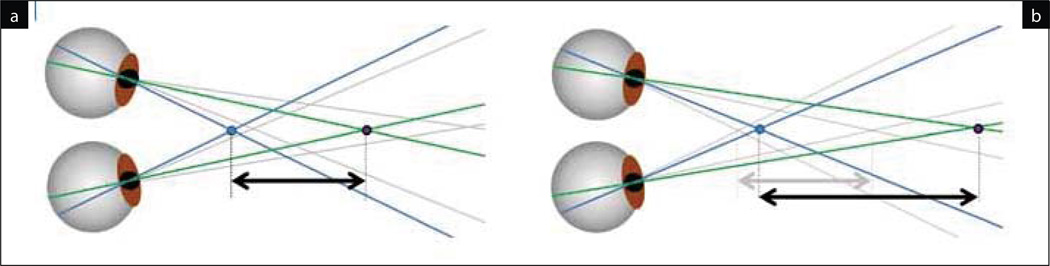
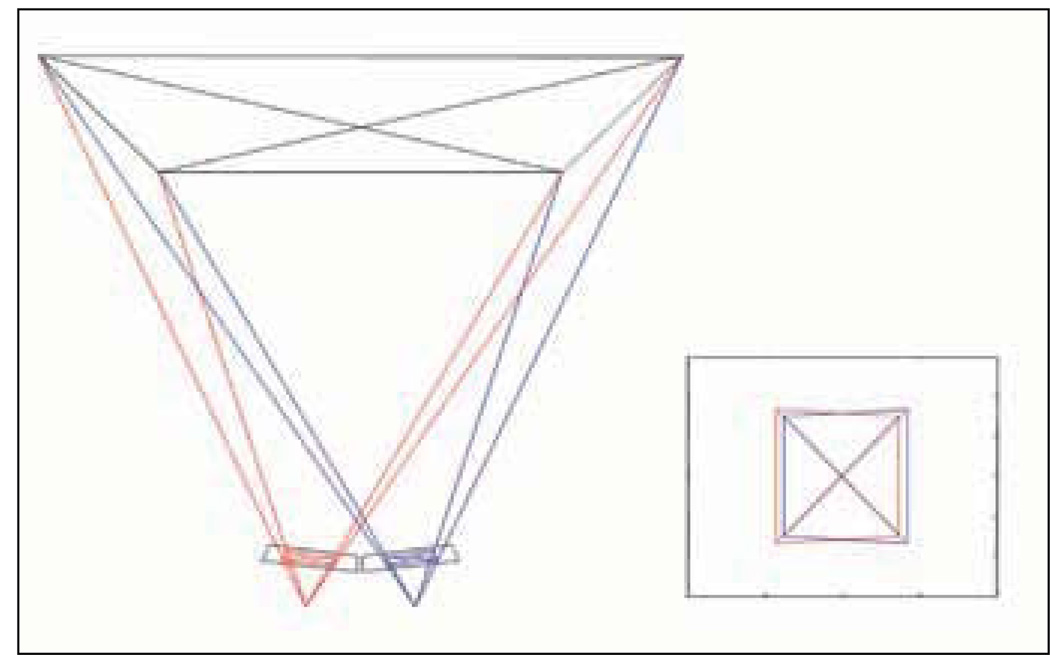
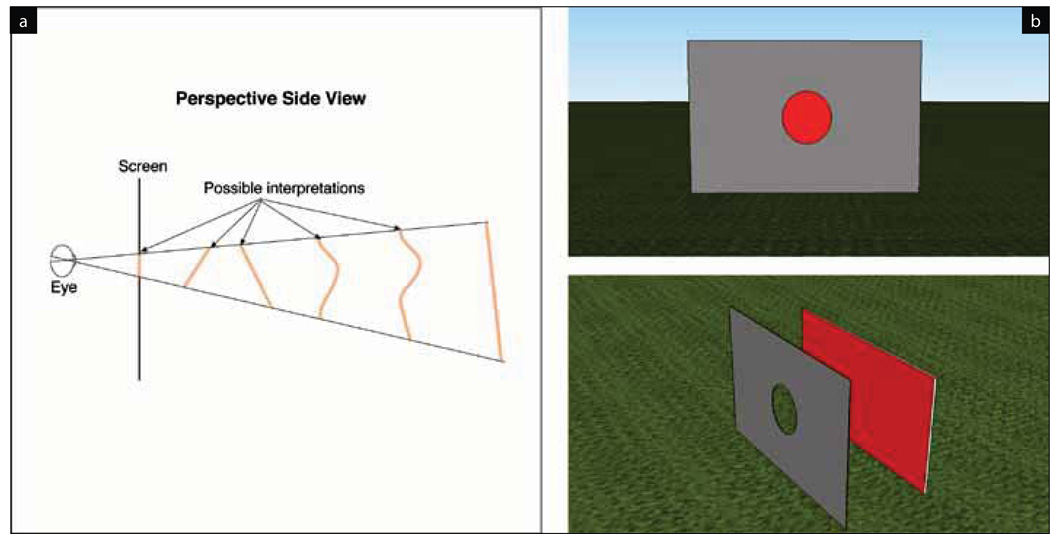
Stereoscopic displays have become important for many applications, including operation of remote devices, medical imaging, surgery, scientific visualization, and computer-assisted design. But the most significant and exciting development is the incorporation of stereo technology into entertainment: specifically, cinema, television, and video games. In these applications for stereo, three-dimensional (3D) imagery should create a faithful impression of the 3D structure of the scene being portrayed. In addition, the viewer should be comfortable and not leave the experience with eye fatigue or a headache. Finally, the presentation of the stereo images should not create temporal artifacts like flicker or motion judder. This paper reviews current research on stereo human vision and how it informs us about how best to create and present stereo 3D imagery. The paper is divided into four parts: (1) getting the geometry right, (2) depth cue interactions in stereo 3D media, (3) focusing and fixating on stereo images, and (4) how temporal presentation protocols affect flicker, motion artifacts, and depth distortion.
Figures

References
-
- Allison RS. Analysis of the Influence of Vertical Disparities Arising in Toed-In Stereoscopic Cameras. J. Imag. Sci. Tech. 2007;51:317–327.
-
- Allison RS, Howard IP, Fang X. Depth Selectivity of Vertical Fusional Mechanisms. Vision Res. 2000;40:2985–2998. - PubMed
-
- Howard IP, Allison RS, Zacher JE. The Dynamics of Vertical Vergence. Exp. Brain Res. 1997;116:153–159. - PubMed
-
- Howard IP, Fang X, Allison RS, Zacher JE. Effects of Stimulus Size and Eccentricity on Horizontal and Vertical Vergence. Exp. Brain Res. 2000;130:124–132. - PubMed
-
- Rogers BJ, Bradshaw MF. Disparity Minimisation, Cyclovergence, and the Validity of Nonius Lines as a Technique for Measuring Torsional Alignment. Perception. 1999;28:127–141. - PubMed
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources