

Development of miniaturized walking biological machines
- PMID: 23155480
- PMCID: PMC3498929
- DOI: 10.1038/srep00857
Development of miniaturized walking biological machines
Abstract
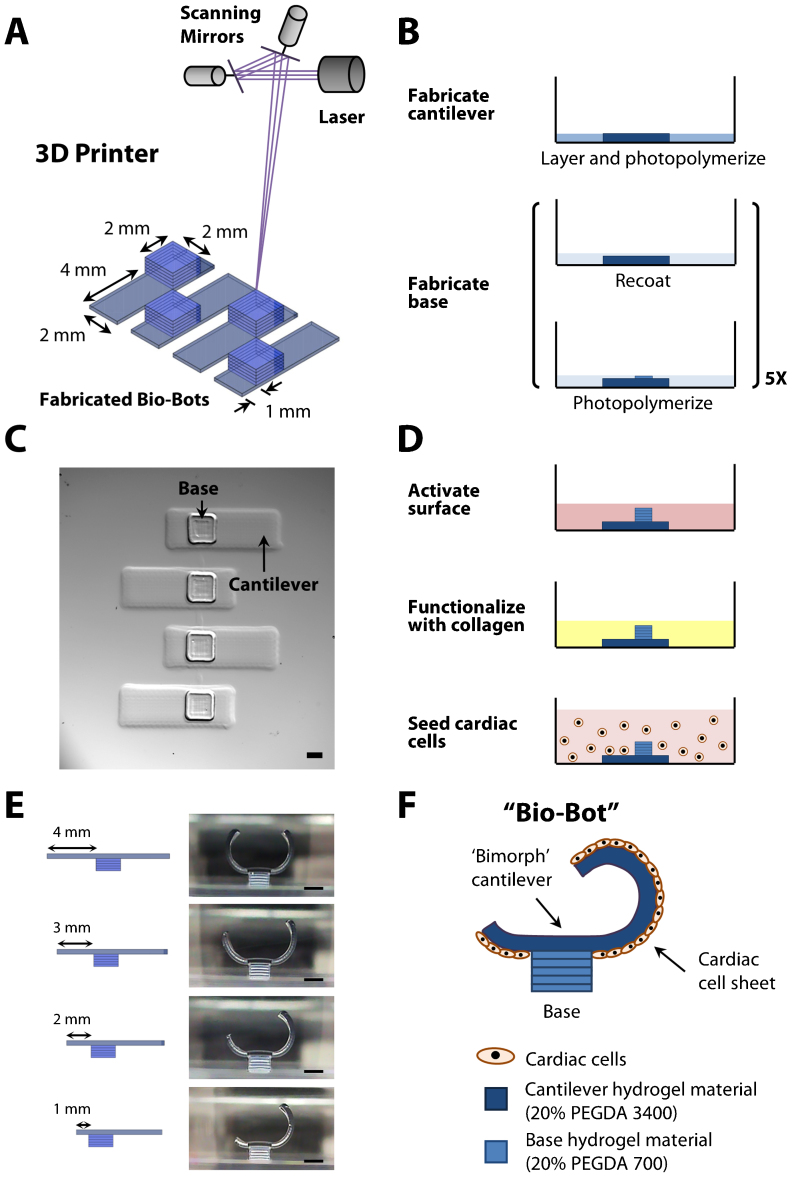
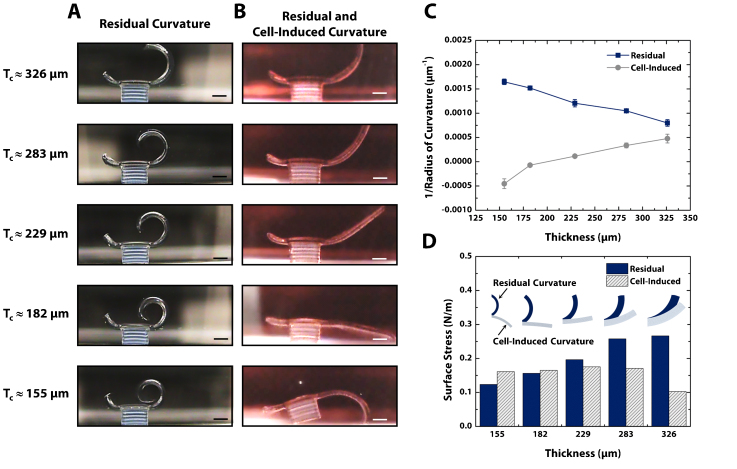
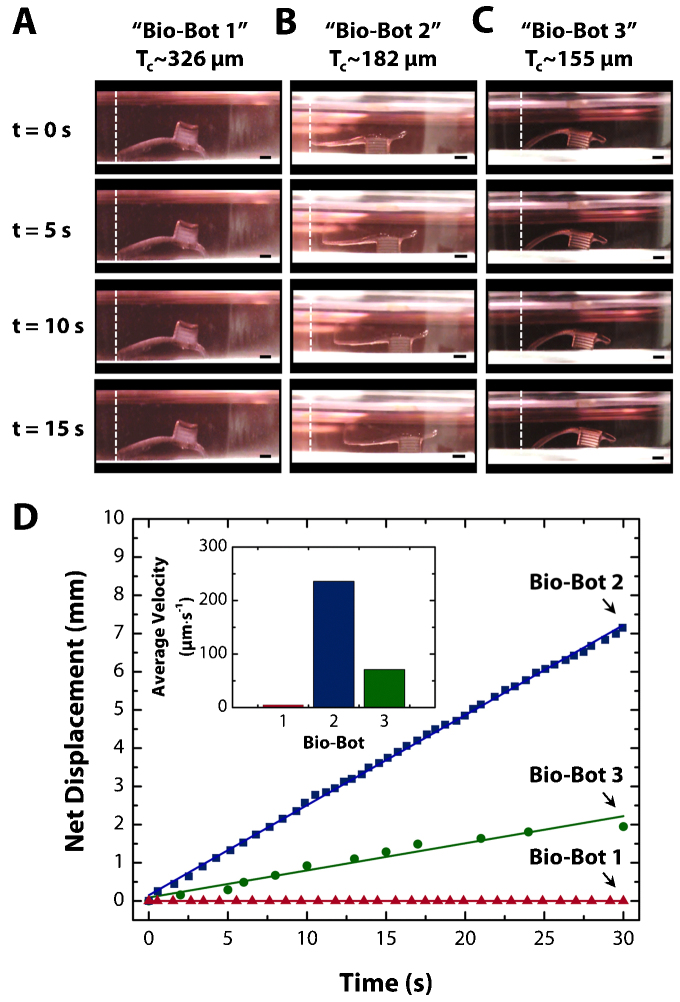
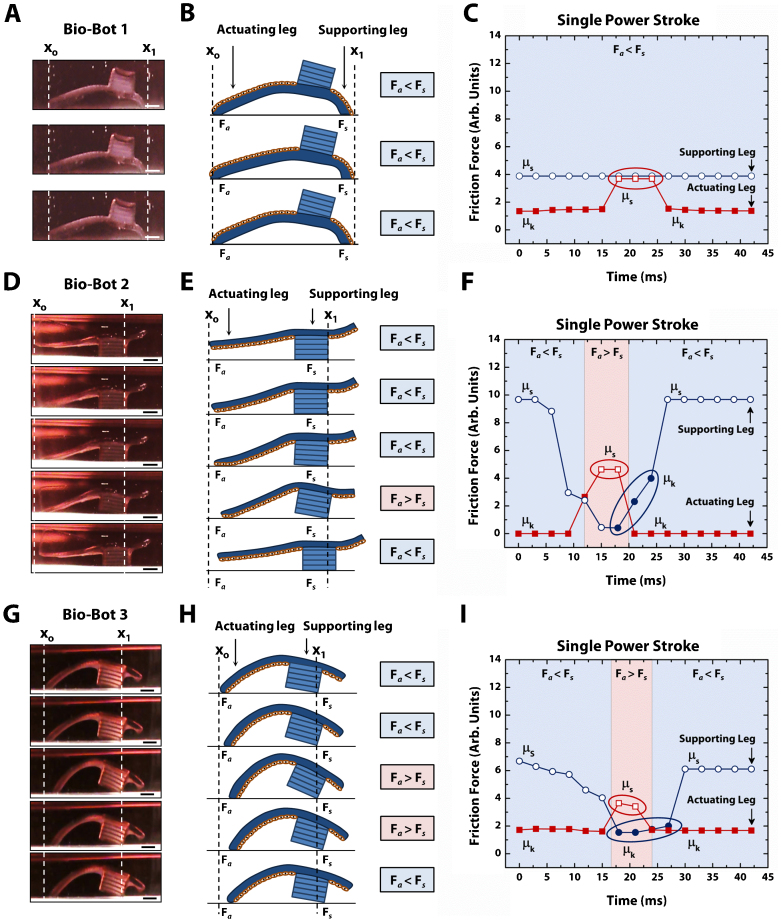
The quest to 'forward-engineer' and fabricate biological machines remains a grand challenge. Towards this end, we have fabricated locomotive "bio-bots" from hydrogels and cardiomyocytes using a 3D printer. The multi-material bio-bot consisted of a 'biological bimorph' cantilever structure as the actuator to power the bio-bot, and a base structure to define the asymmetric shape for locomotion. The cantilever structure was seeded with a sheet of contractile cardiomyocytes. We evaluated the locomotive mechanisms of several designs of bio-bots by changing the cantilever thickness. The bio-bot that demonstrated the most efficient mechanism of locomotion maximized the use of contractile forces for overcoming friction of the supporting leg, while preventing backward movement of the actuating leg upon relaxation. The maximum recorded velocity of the bio-bot was ~236 µm s(-1), with an average displacement per power stroke of ~354 µm and average beating frequency of ~1.5 Hz.
Figures
References
-
- Basu S., Gerchman Y., Collins C. H., Arnold F. H. & Weiss R. A synthetic multicellular system for programmed pattern formation. Nature 434, 1130–1134 (2005). - PubMed
-
- Kamm R. D., Nerem R. M. & Hsia K. J. Cells into systems. Mech. Eng. 30–34 (2010).
-
- Lutolf M. P. & Hubbell J. A. Synthetic biomaterials as instructive extracellular microenvironments for morphogenesis in tissue engineering. Nat. Biotechnol. 23, 47–55 (2005). - PubMed
-
- Chung S., Lee J. H., Moon M. W., Han J. & Kamm R. D. Non-lithographic wrinkle nanochannels for protein preconcentration. Adv. Mater. 20, 3011–3016 (2008).
-
- Grzybowski B. A. & Bishop K. J. Micro- and nanoprinting into solids using reaction diffusion etching and hydrogel stamps. Small 5, 22–27 (2009). - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
