

Optimal space-time precoding of artificial sensory feedback through mutichannel microstimulation in bi-directional brain-machine interfaces
- PMID: 23187009
- PMCID: PMC5988221
- DOI: 10.1088/1741-2560/9/6/065004
Optimal space-time precoding of artificial sensory feedback through mutichannel microstimulation in bi-directional brain-machine interfaces
Abstract
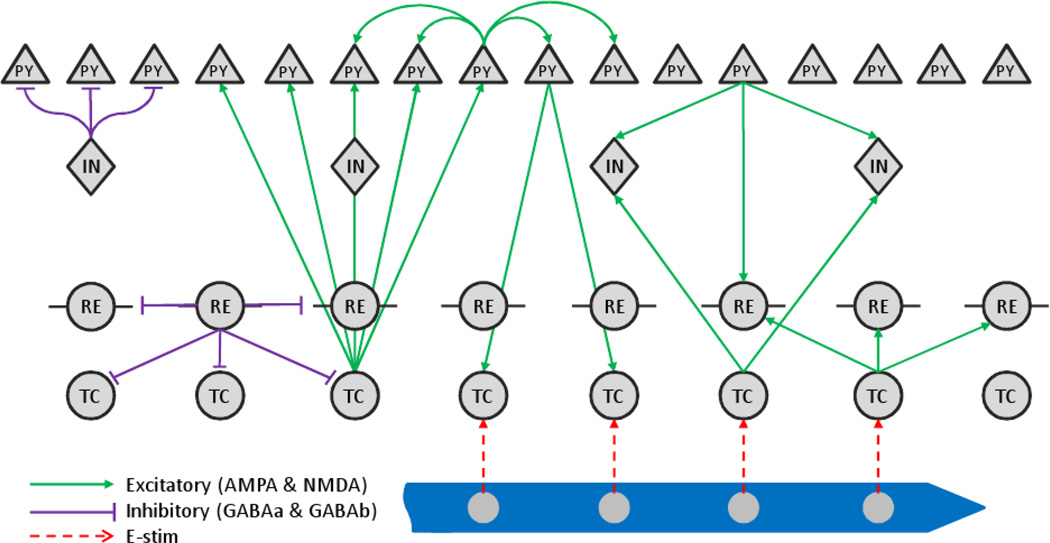
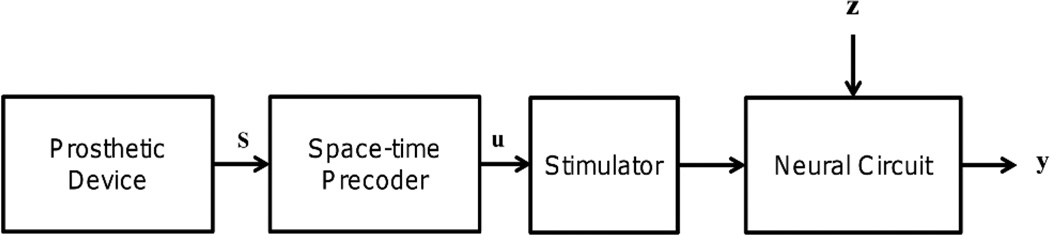
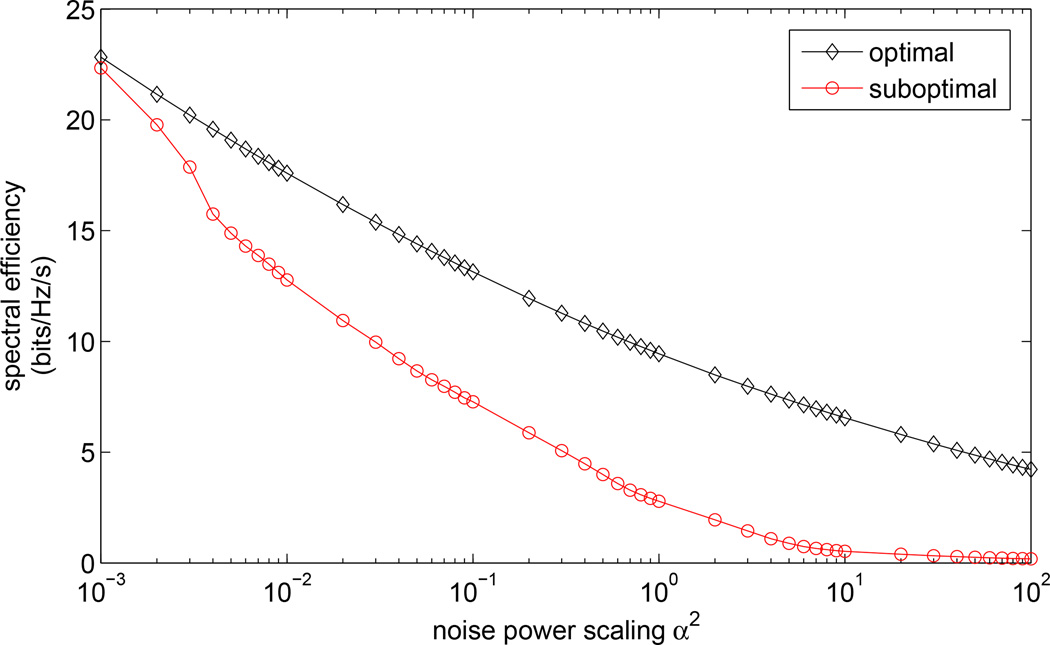
Brain-machine interfaces (BMIs) aim to restore lost sensorimotor and cognitive function in subjects with severe neurological deficits. In particular, lost somatosensory function may be restored by artificially evoking patterns of neural activity through microstimulation to induce perception of tactile and proprioceptive feedback to the brain about the state of the limb. Despite an early proof of concept that subjects could learn to discriminate a limited vocabulary of intracortical microstimulation (ICMS) patterns that instruct the subject about the state of the limb, the dynamics of a moving limb are unlikely to be perceived by an arbitrarily-selected, discrete set of static microstimulation patterns, raising questions about the generalization and the scalability of this approach. In this work, we propose a microstimulation protocol intended to activate optimally the ascending somatosensory pathway. The optimization is achieved through a space-time precoder that maximizes the mutual information between the sensory feedback indicating the limb state and the cortical neural response evoked by thalamic microstimulation. Using a simplified multi-input multi-output model of the thalamocortical pathway, we show that this optimal precoder can deliver information more efficiently in the presence of noise compared to suboptimal precoders that do not account for the afferent pathway structure and/or cortical states. These results are expected to enhance the way microstimulation is used to induce somatosensory perception during sensorimotor control of artificial devices or paralyzed limbs.
Figures



Similar articles
-
Restoring tactile and proprioceptive sensation through a brain interface.Neurobiol Dis. 2015 Nov;83:191-8. doi: 10.1016/j.nbd.2014.08.029. Epub 2014 Sep 6. Neurobiol Dis. 2015. PMID: 25201560 Free PMC article. Review.
-
Short reaction times in response to multi-electrode intracortical microstimulation may provide a basis for rapid movement-related feedback.J Neural Eng. 2019 Dec 17;17(1):016013. doi: 10.1088/1741-2552/ab5cf3. J Neural Eng. 2019. PMID: 31778982 Free PMC article.
-
Neural feedback for instantaneous spatiotemporal modulation of afferent pathways in bi-directional brain-machine interfaces.IEEE Trans Neural Syst Rehabil Eng. 2011 Oct;19(5):521-33. doi: 10.1109/TNSRE.2011.2162003. Epub 2011 Aug 18. IEEE Trans Neural Syst Rehabil Eng. 2011. PMID: 21859634
-
Characterizing the short-latency evoked response to intracortical microstimulation across a multi-electrode array.J Neural Eng. 2022 Apr 20;19(2):10.1088/1741-2552/ac63e8. doi: 10.1088/1741-2552/ac63e8. J Neural Eng. 2022. PMID: 35378515 Free PMC article.
-
Microstimulation: Principles, Techniques, and Approaches to Somatosensory Neuroprosthesis.Crit Rev Biomed Eng. 2015;43(1):61-95. doi: 10.1615/critrevbiomedeng.2015012287. Crit Rev Biomed Eng. 2015. PMID: 26351023 Review.
Cited by
-
A comprehensive model-based framework for optimal design of biomimetic patterns of electrical stimulation for prosthetic sensation.J Neural Eng. 2020 Sep 18;17(4):046045. doi: 10.1088/1741-2552/abacd8. J Neural Eng. 2020. PMID: 32759488 Free PMC article.
-
System identification of the nonlinear dynamics in the thalamocortical circuit in response to patterned thalamic microstimulation in vivo.J Neural Eng. 2013 Dec;10(6):066011. doi: 10.1088/1741-2560/10/6/066011. Epub 2013 Oct 25. J Neural Eng. 2013. PMID: 24162186 Free PMC article.
-
A learning-based approach to artificial sensory feedback leads to optimal integration.Nat Neurosci. 2015 Jan;18(1):138-44. doi: 10.1038/nn.3883. Epub 2014 Nov 24. Nat Neurosci. 2015. PMID: 25420067 Free PMC article.
-
Restoring tactile and proprioceptive sensation through a brain interface.Neurobiol Dis. 2015 Nov;83:191-8. doi: 10.1016/j.nbd.2014.08.029. Epub 2014 Sep 6. Neurobiol Dis. 2015. PMID: 25201560 Free PMC article. Review.
-
Electrical and Optical Activation of Mesoscale Neural Circuits with Implications for Coding.J Neurosci. 2015 Nov 25;35(47):15702-15. doi: 10.1523/JNEUROSCI.5045-14.2015. J Neurosci. 2015. PMID: 26609162 Free PMC article.
References
-
- Venkatraman S, Carmena JM. Active sensing of target location encoded by cortical microstimulation. Neural Systems and Rehabilitation Engineering, IEEE Transactions on. 2011 Jun;19(3):317–324. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources