

Finger pad friction and its role in grip and touch
- PMID: 23256185
- PMCID: PMC3565724
- DOI: 10.1098/rsif.2012.0467
Finger pad friction and its role in grip and touch
Abstract
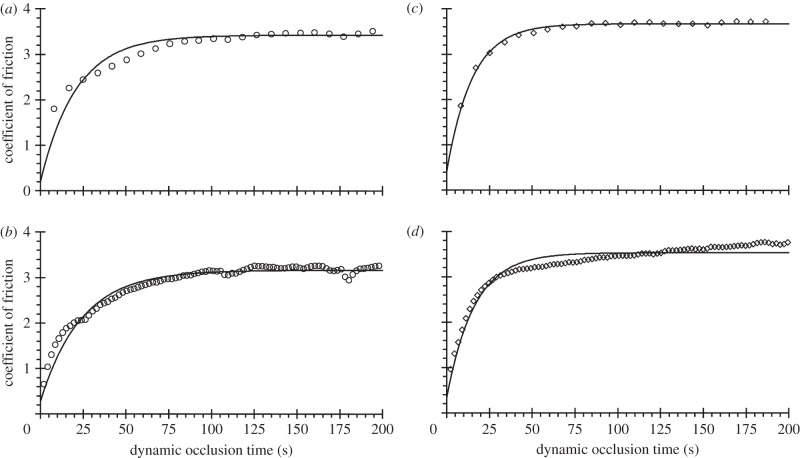
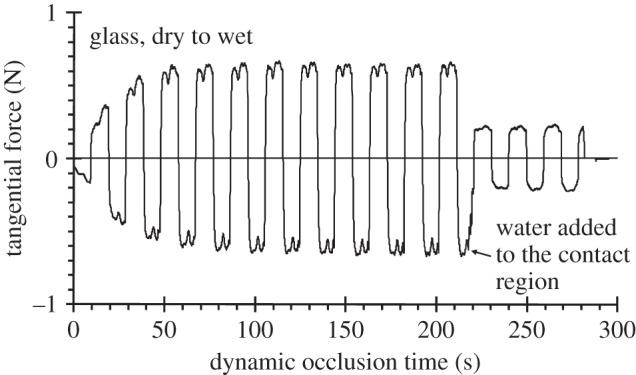
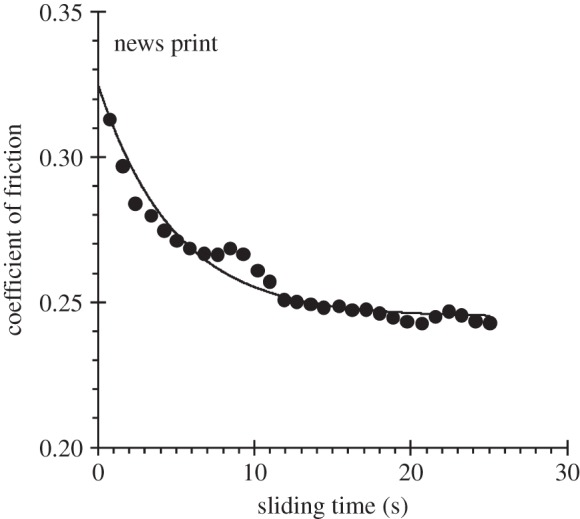
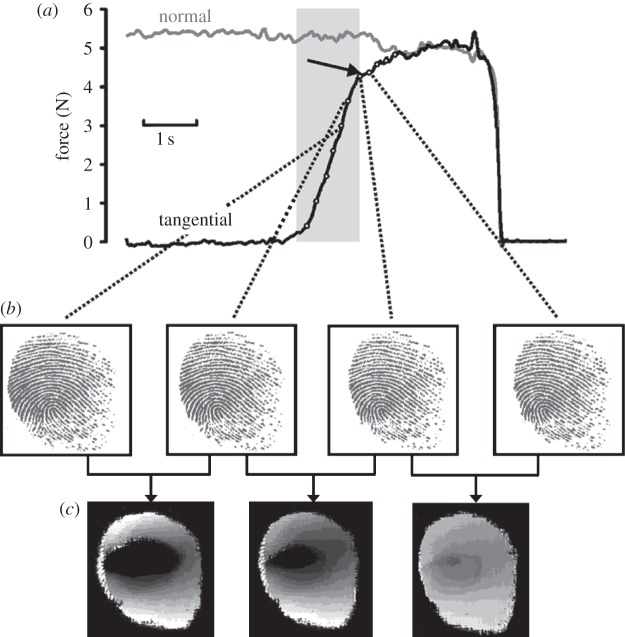
Many aspects of both grip function and tactile perception depend on complex frictional interactions occurring in the contact zone of the finger pad, which is the subject of the current review. While it is well established that friction plays a crucial role in grip function, its exact contribution for discriminatory touch involving the sliding of a finger pad is more elusive. For texture discrimination, it is clear that vibrotaction plays an important role in the discriminatory mechanisms. Among other factors, friction impacts the nature of the vibrations generated by the relative movement of the fingertip skin against a probed object. Friction also has a major influence on the perceived tactile pleasantness of a surface. The contact mechanics of a finger pad is governed by the fingerprint ridges and the sweat that is exuded from pores located on these ridges. Counterintuitively, the coefficient of friction can increase by an order of magnitude in a period of tens of seconds when in contact with an impermeably smooth surface, such as glass. In contrast, the value will decrease for a porous surface, such as paper. The increase in friction is attributed to an occlusion mechanism and can be described by first-order kinetics. Surprisingly, the sensitivity of the coefficient of friction to the normal load and sliding velocity is comparatively of second order, yet these dependencies provide the main basis of theoretical models which, to-date, largely ignore the time evolution of the frictional dynamics. One well-known effect on taction is the possibility of inducing stick-slip if the friction decreases with increasing sliding velocity. Moreover, the initial slip of a finger pad occurs by the propagation of an annulus of failure from the perimeter of the contact zone and this phenomenon could be important in tactile perception and grip function.
Figures
References
-
- Vallbo AB, Johansson RS. 1984. Properties of cutaneous mechanoreceptors in the human hand related to touch sensation. Hum. Neurobiol. 3, 3–14 - PubMed
-
- Jones LA, Lederman SJ. 2006. Human hand function. New York, NY: Oxford University Press, Inc
-
- Johansson RS, Vallbo AB. 1983. Tactile sensory coding in the glabrous skin of the human hand. Trends Neurosci. 6, 27–32 10.1016/0166-2236(83)90011-5 (doi:10.1016/0166-2236(83)90011-5) - DOI
-
- Westling G, Johansson RS. 1984. Factors influencing the force control during precision grip. Exp. Brain Res. 53, 277–284 10.1007/BF00238156 (doi:10.1007/BF00238156) - DOI - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources