

Non-local statistical label fusion for multi-atlas segmentation
- PMID: 23265798
- PMCID: PMC3648421
- DOI: 10.1016/j.media.2012.10.002
Non-local statistical label fusion for multi-atlas segmentation
Abstract
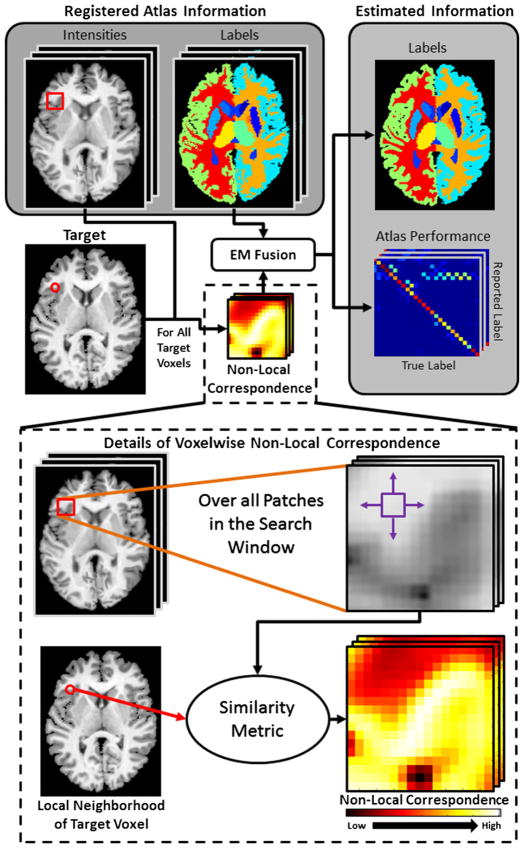
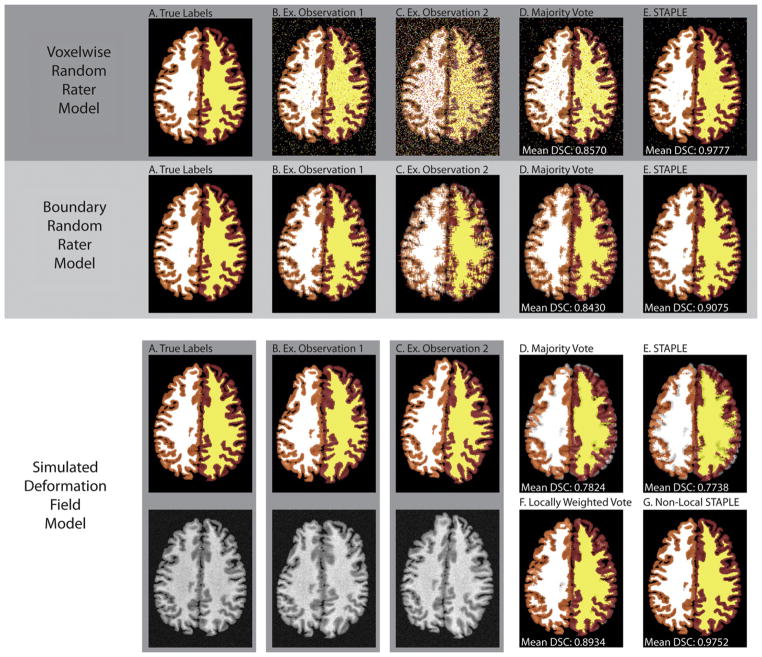
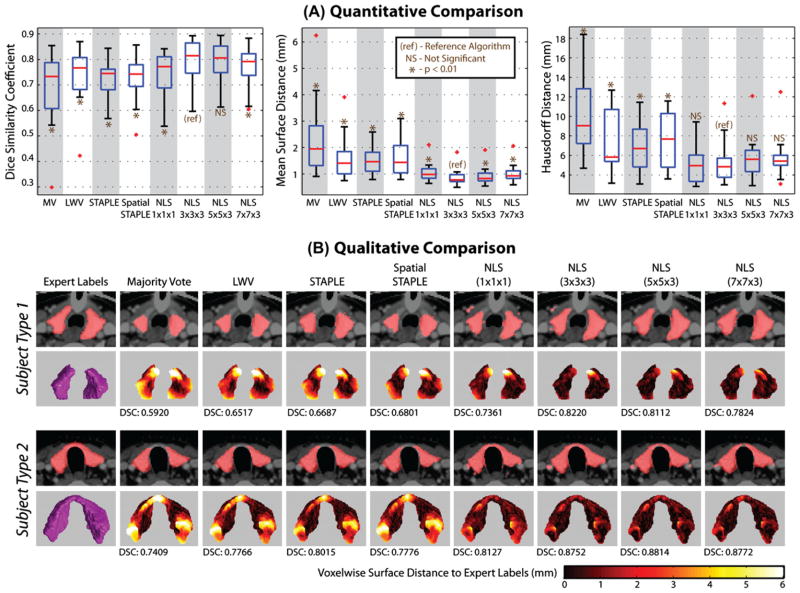
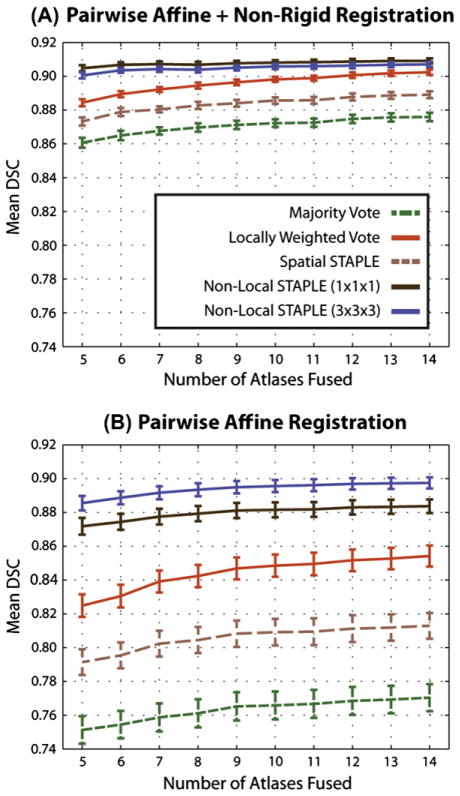
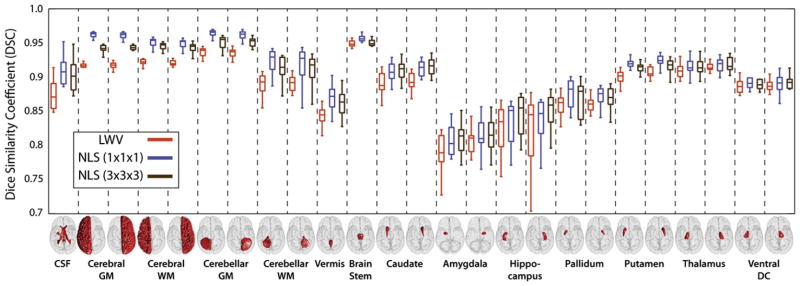
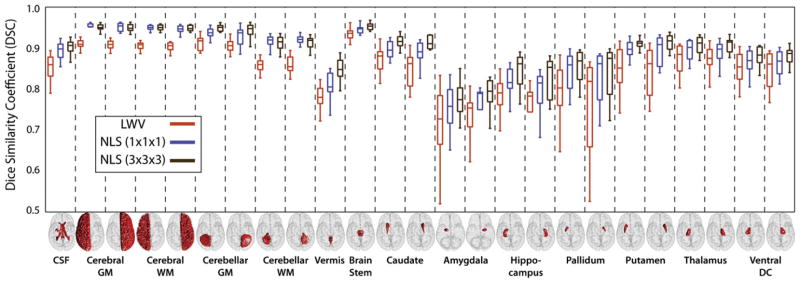
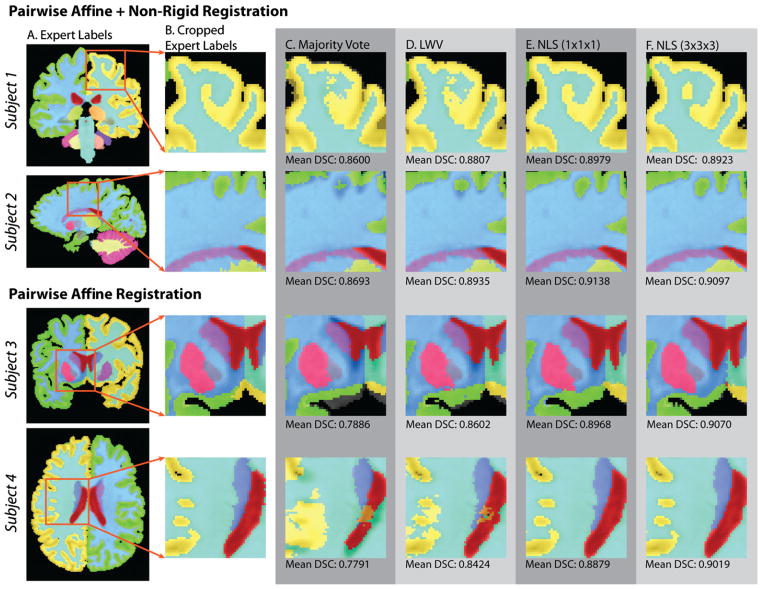
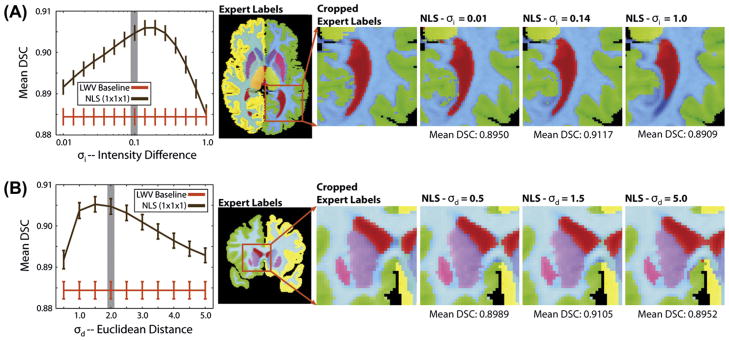
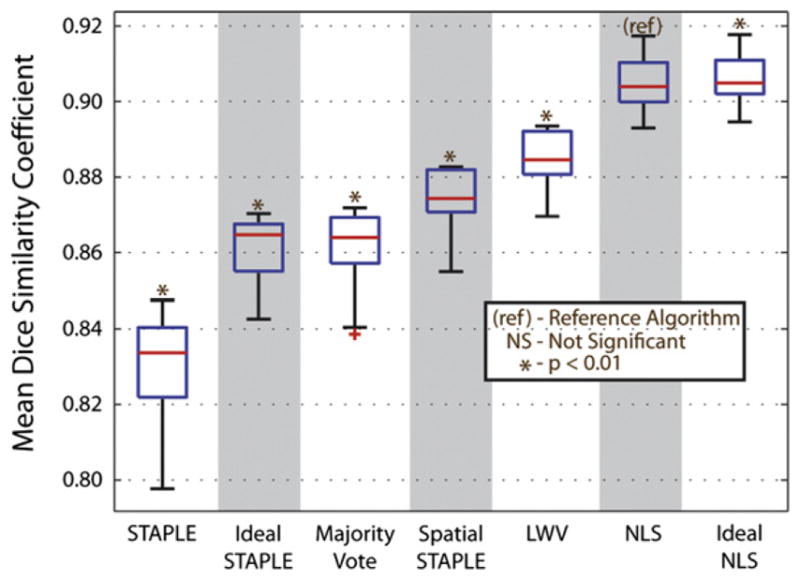
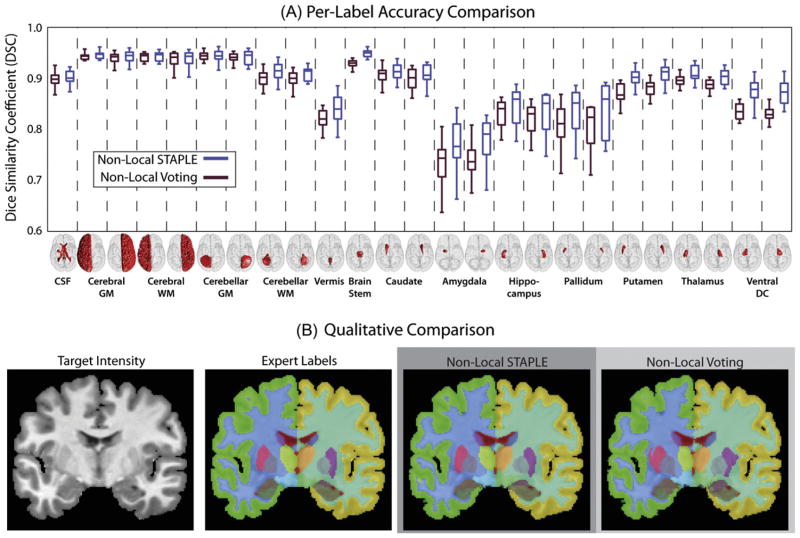
Multi-atlas segmentation provides a general purpose, fully-automated approach for transferring spatial information from an existing dataset ("atlases") to a previously unseen context ("target") through image registration. The method to resolve voxelwise label conflicts between the registered atlases ("label fusion") has a substantial impact on segmentation quality. Ideally, statistical fusion algorithms (e.g., STAPLE) would result in accurate segmentations as they provide a framework to elegantly integrate models of rater performance. The accuracy of statistical fusion hinges upon accurately modeling the underlying process of how raters err. Despite success on human raters, current approaches inaccurately model multi-atlas behavior as they fail to seamlessly incorporate exogenous intensity information into the estimation process. As a result, locally weighted voting algorithms represent the de facto standard fusion approach in clinical applications. Moreover, regardless of the approach, fusion algorithms are generally dependent upon large atlas sets and highly accurate registration as they implicitly assume that the registered atlases form a collectively unbiased representation of the target. Herein, we propose a novel statistical fusion algorithm, Non-Local STAPLE (NLS). NLS reformulates the STAPLE framework from a non-local means perspective in order to learn what label an atlas would have observed, given perfect correspondence. Through this reformulation, NLS (1) seamlessly integrates intensity into the estimation process, (2) provides a theoretically consistent model of multi-atlas observation error, and (3) largely diminishes the need for large atlas sets and very high-quality registrations. We assess the sensitivity and optimality of the approach and demonstrate significant improvement in two empirical multi-atlas experiments.
Copyright © 2012 Elsevier B.V. All rights reserved.
Figures
References
-
- Aljabar P, Heckemann R, Hammers A, Hajnal J, Rueckert D. Multi-atlas based segmentation of brain images: atlas selection and its effect on accuracy. Neuroimage. 2009;46:726–738. - PubMed
-
- Artaechevarria X, Muñoz-Barrutia A, Ortiz-de-Solorzano C. Combination strategies in multi-atlas image segmentation: application to brain MR data. IEEE Transactions on Medical Imaging. 2009;28:1266–1277. - PubMed
-
- Ashburner J, Friston KJ. Unified segmentation. Neuroimage. 2005;26:839–851. - PubMed
-
- Ashton EA, Takahashi C, Berg MJ, Goodman A, Totterman S, Ekholm S. Accuracy and reproducibility of manual and semiautomated quantification of MS lesions by MRI. Journal of Magnetic Resonance Imaging. 2003;17:300–308. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Research Materials
