

Locomotor adaptation to a soleus EMG-controlled antagonistic exoskeleton
- PMID: 23307949
- PMCID: PMC3628010
- DOI: 10.1152/jn.01128.2011
Locomotor adaptation to a soleus EMG-controlled antagonistic exoskeleton
Abstract
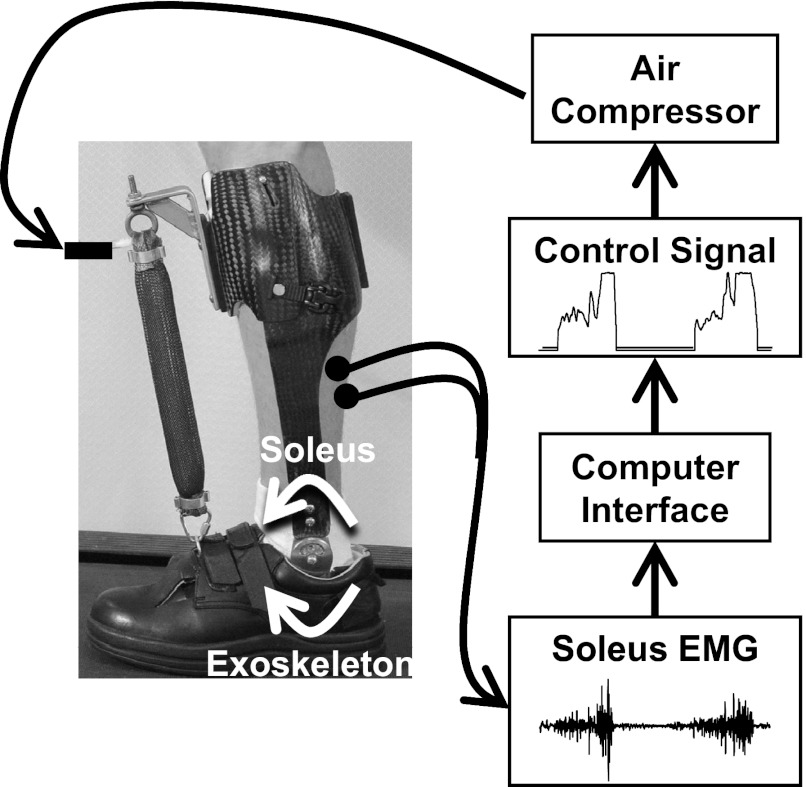
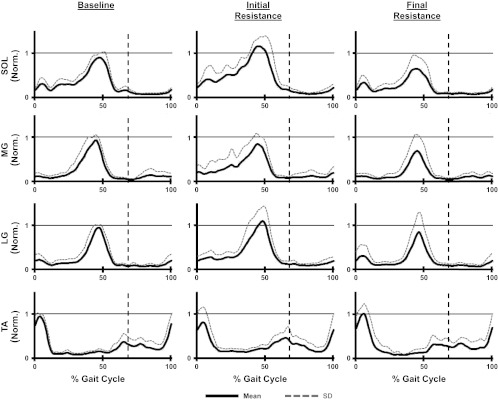
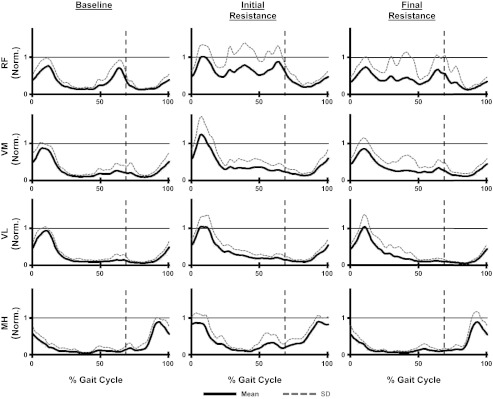
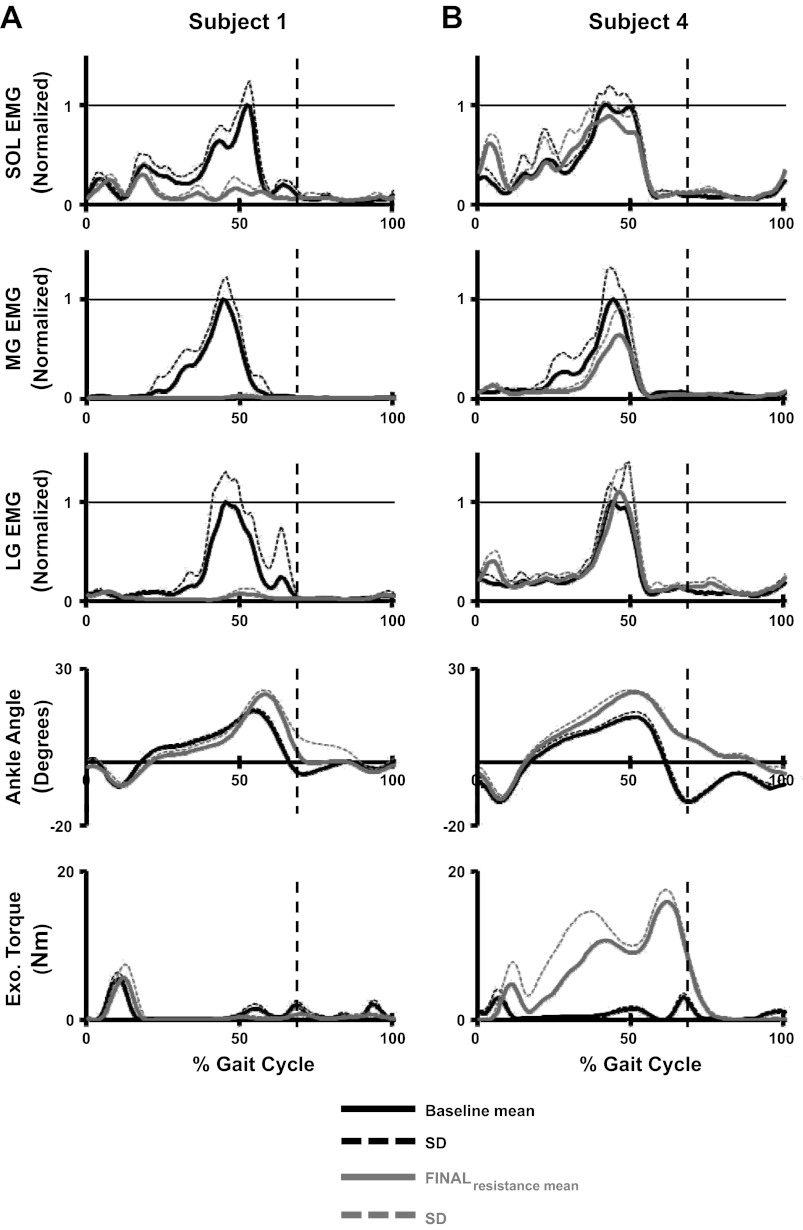
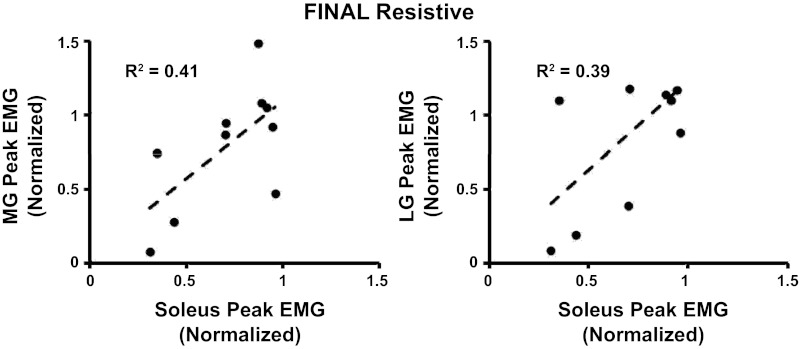
Locomotor adaptation in humans is not well understood. To provide insight into the neural reorganization that occurs following a significant disruption to one's learned neuromuscular map relating a given motor command to its resulting muscular action, we tied the mechanical action of a robotic exoskeleton to the electromyography (EMG) profile of the soleus muscle during walking. The powered exoskeleton produced an ankle dorsiflexion torque proportional to soleus muscle recruitment thus limiting the soleus' plantar flexion torque capability. We hypothesized that neurologically intact subjects would alter muscle activation patterns in response to the antagonistic exoskeleton by decreasing soleus recruitment. Subjects practiced walking with the exoskeleton for two 30-min sessions. The initial response to the perturbation was to "fight" the resistive exoskeleton by increasing soleus activation. By the end of training, subjects had significantly reduced soleus recruitment resulting in a gait pattern with almost no ankle push-off. In addition, there was a trend for subjects to reduce gastrocnemius recruitment in proportion to the soleus even though only the soleus EMG was used to control the exoskeleton. The results from this study demonstrate the ability of the nervous system to recalibrate locomotor output in response to substantial changes in the mechanical output of the soleus muscle and associated sensory feedback. This study provides further evidence that the human locomotor system of intact individuals is highly flexible and able to adapt to achieve effective locomotion in response to a broad range of neuromuscular perturbations.
Figures
References
-
- Alexander RM. Energetics and optimization of human walking and running: the 2000 Raymond Pearl Memorial Lecture. Am J Hum Biol 14: 641–648, 2002 - PubMed
-
- Arsenault AB, Winter DA, Marteniuk RG. Is there a ‘normal’ profile of EMG activity in gait? Med Biol Eng Comput 24: 337–343, 1986 - PubMed
-
- Bertram JE, Ruina A. Multiple walking speed-frequency relations are predicted by constrained optimization. J Theor Biol 209: 445–453, 2001 - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources