

Observability of complex systems
- PMID: 23359701
- PMCID: PMC3574950
- DOI: 10.1073/pnas.1215508110
Observability of complex systems
Abstract
A quantitative description of a complex system is inherently limited by our ability to estimate the system's internal state from experimentally accessible outputs. Although the simultaneous measurement of all internal variables, like all metabolite concentrations in a cell, offers a complete description of a system's state, in practice experimental access is limited to only a subset of variables, or sensors. A system is called observable if we can reconstruct the system's complete internal state from its outputs. Here, we adopt a graphical approach derived from the dynamical laws that govern a system to determine the sensors that are necessary to reconstruct the full internal state of a complex system. We apply this approach to biochemical reaction systems, finding that the identified sensors are not only necessary but also sufficient for observability. The developed approach can also identify the optimal sensors for target or partial observability, helping us reconstruct selected state variables from appropriately chosen outputs, a prerequisite for optimal biomarker design. Given the fundamental role observability plays in complex systems, these results offer avenues to systematically explore the dynamics of a wide range of natural, technological and socioeconomic systems.
Conflict of interest statement
The authors declare no conflict of interest.
Figures

 and
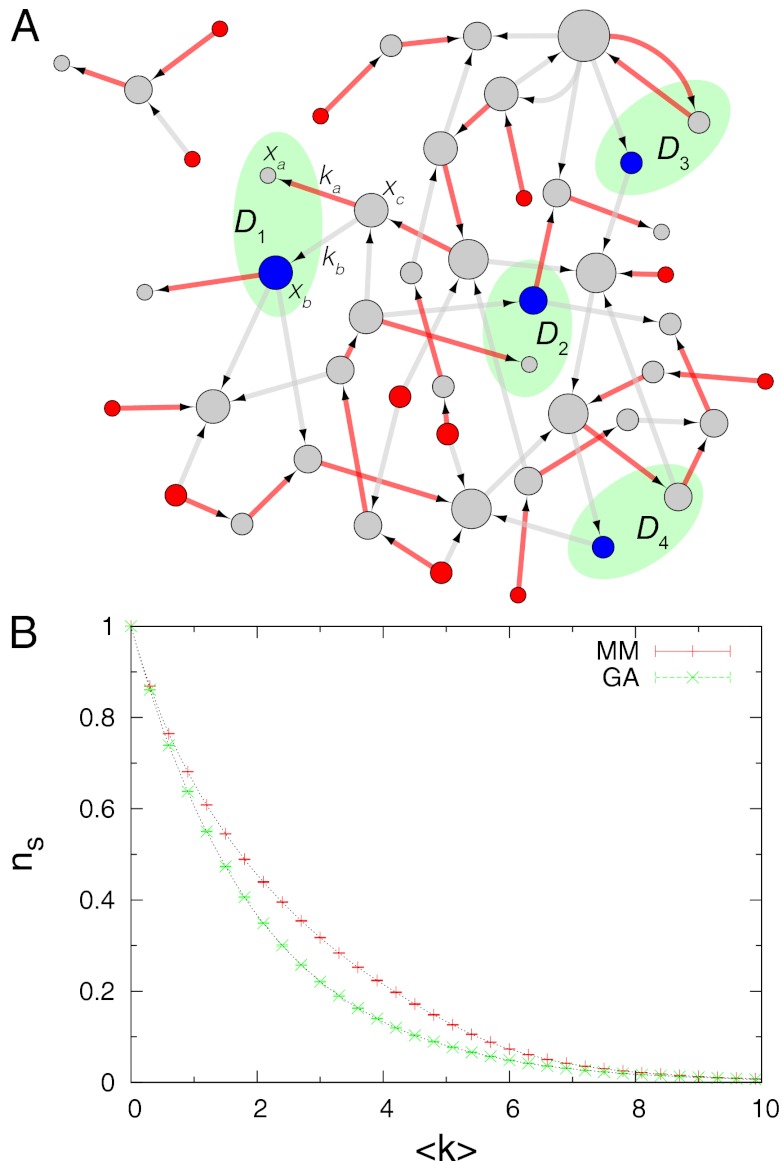
and  , the minimum set of sensors sufficient for full observability can be calculated exactly using the maximum matching (MM) algorithm (17), whereas the necessary sensor set is provided by the GA. (A) Erdös–Rényi (ER) network with mean degree 〈k〉 ∼ 3.5. The necessary sensor set predicted by GA is shown in red; the additional nodes that we also need to be monitor to obtain full observability are shown in blue. Hence, red and blue nodes together form the sufficient sensor set. Dilations are highlighted in green. Dilation occurs if there is a subset S of the nodes (i.e., the state variables) such that
, the minimum set of sensors sufficient for full observability can be calculated exactly using the maximum matching (MM) algorithm (17), whereas the necessary sensor set is provided by the GA. (A) Erdös–Rényi (ER) network with mean degree 〈k〉 ∼ 3.5. The necessary sensor set predicted by GA is shown in red; the additional nodes that we also need to be monitor to obtain full observability are shown in blue. Hence, red and blue nodes together form the sufficient sensor set. Dilations are highlighted in green. Dilation occurs if there is a subset S of the nodes (i.e., the state variables) such that  , where the neighborhood set
, where the neighborhood set  of a set S is defined to be the set of all nodes j where a directed edge exists from j to a node in S (6). Such dilations can be identified via MM algorithm. If the blue nodes are not monitored then their dilations will cause symmetries that leave the outputs and derivatives of outputs invariant. For example, in A, if xb is not monitored, the subset S1 = {xa, xb} will cause a dilation D1 and a family of symmetries
of a set S is defined to be the set of all nodes j where a directed edge exists from j to a node in S (6). Such dilations can be identified via MM algorithm. If the blue nodes are not monitored then their dilations will cause symmetries that leave the outputs and derivatives of outputs invariant. For example, in A, if xb is not monitored, the subset S1 = {xa, xb} will cause a dilation D1 and a family of symmetries  that leave the outputs (and their derivatives) invariant because
that leave the outputs (and their derivatives) invariant because  . (B) ns representing the fraction of sensors, predicted by GA (green “x”) or MM (red “+”), as a function of 〈k〉 for ER random networks of size n = 104. The results are averaged over 10 realizations with error bars defined as SEM. The difference between the two curves indicates that for such linear systems GA underestimates the necessary sensor set. (Similar results are also obtained for linear systems with scale-free random network topology; refs. , .) We find, however, that for nonlinear dynamics, the GA-identified nodes can be both sufficient and necessary for observability, as symmetries in state variables are very unlikely for large systems.
. (B) ns representing the fraction of sensors, predicted by GA (green “x”) or MM (red “+”), as a function of 〈k〉 for ER random networks of size n = 104. The results are averaged over 10 realizations with error bars defined as SEM. The difference between the two curves indicates that for such linear systems GA underestimates the necessary sensor set. (Similar results are also obtained for linear systems with scale-free random network topology; refs. , .) We find, however, that for nonlinear dynamics, the GA-identified nodes can be both sufficient and necessary for observability, as symmetries in state variables are very unlikely for large systems.
References
-
- Diop S, Fliess M. 1991. On nonlinear observability, Proceedings of ECC’91 (Hermès, Paris), Vol 1, pp 152–157.
-
- Diop S, Fliess M. 1991. Nonlinear observability, identifiability, and persistent trajectories, Proceedings of the 30th IEEE Conference on Decision and Control (IEEE Press, New York), Vol 1, pp 714–719.
-
- Kalman RE. Mathematical description of linear dynamical systems. J Soc Ind Appl Math Ser A. 1963;1(2):152–192.
-
- Luenberger DG. Introduction to Dynamic Systems: Theory, Models, & Applications. New York: Wiley; 1979.
-
- Sedoglavic A. A probabilistic algorithm to test local algebraic observability in polynomial time. J Symb Comput. 2002;33(5):735–755.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
