

Collision-avoidance behaviors of minimally restrained flying locusts to looming stimuli
- PMID: 23364572
- PMCID: PMC3561775
- DOI: 10.1242/jeb.077453
Collision-avoidance behaviors of minimally restrained flying locusts to looming stimuli
Abstract
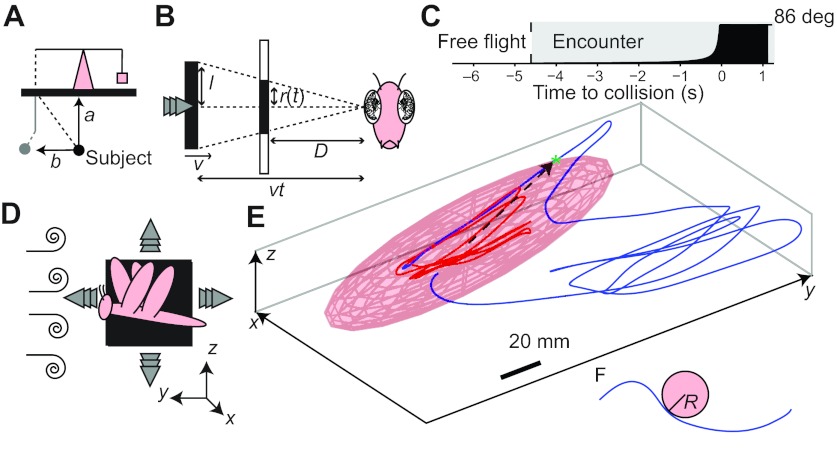
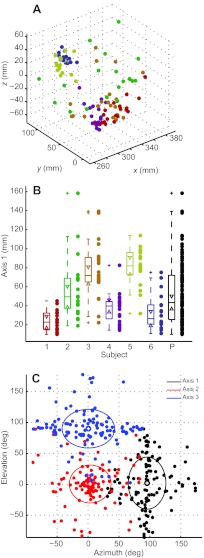
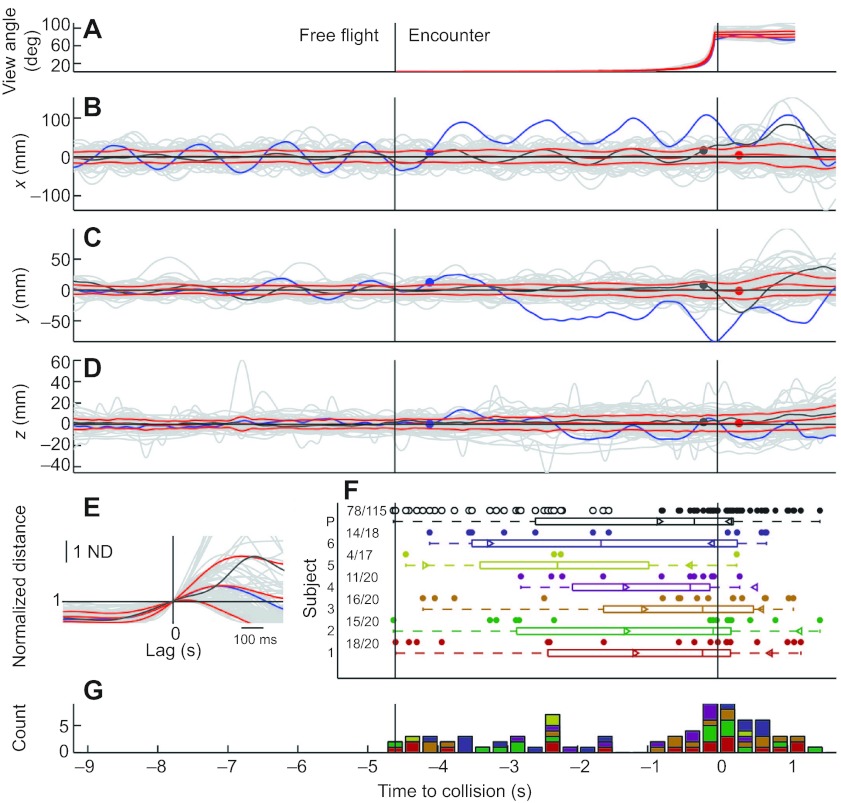
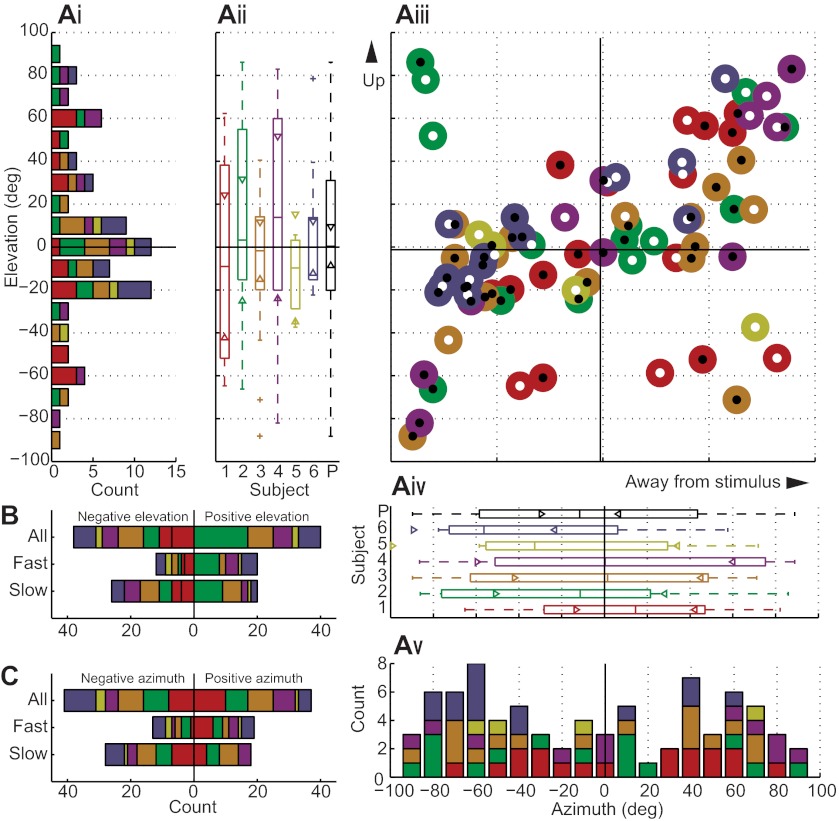
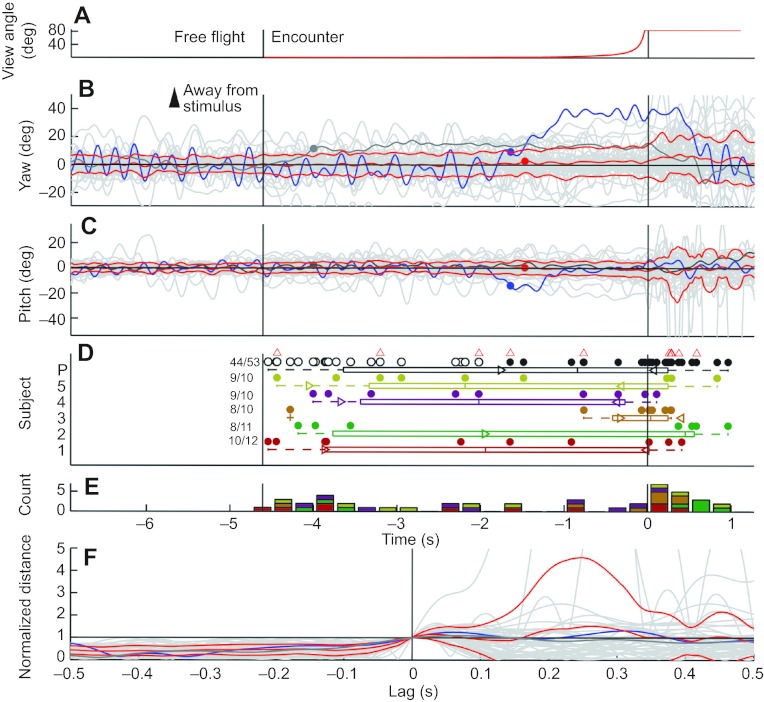
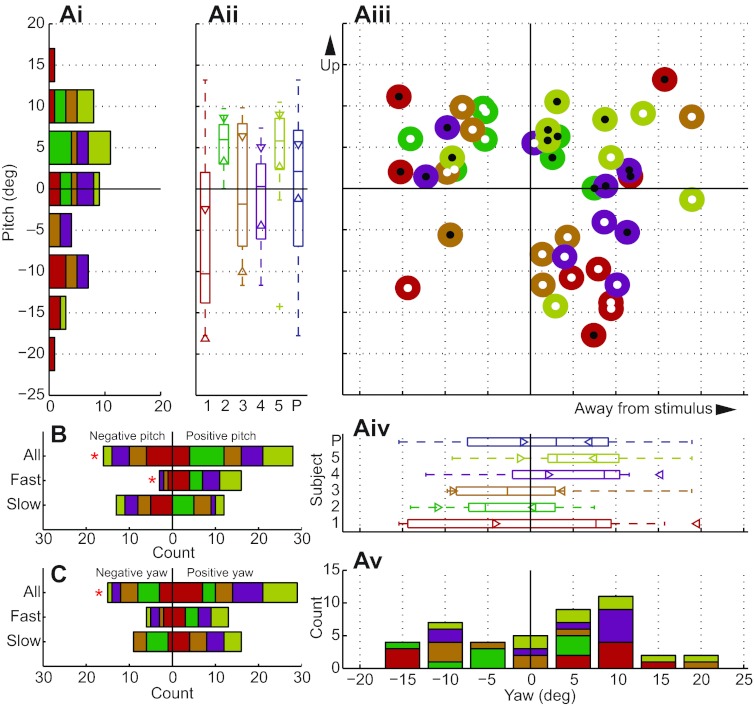
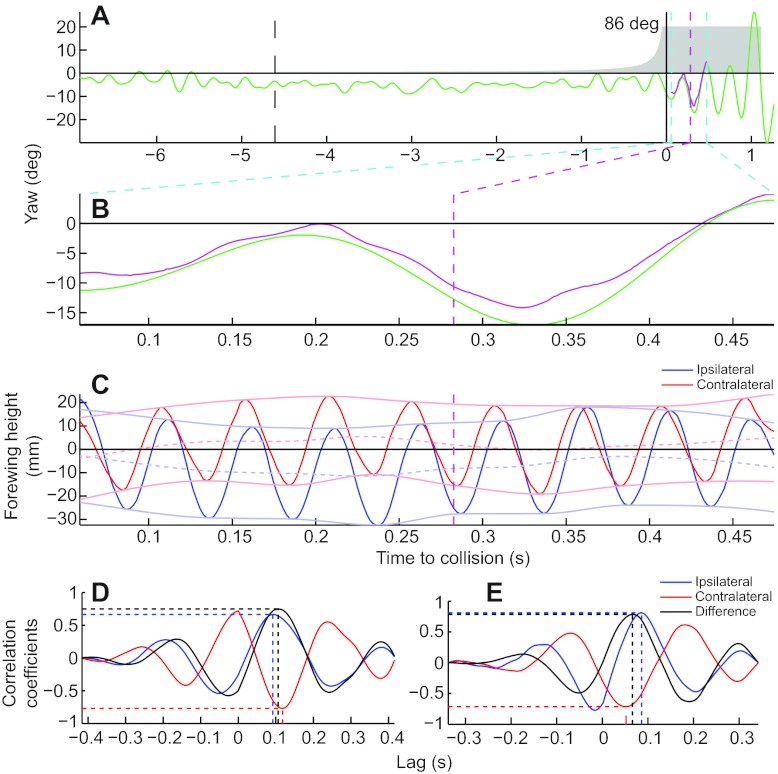
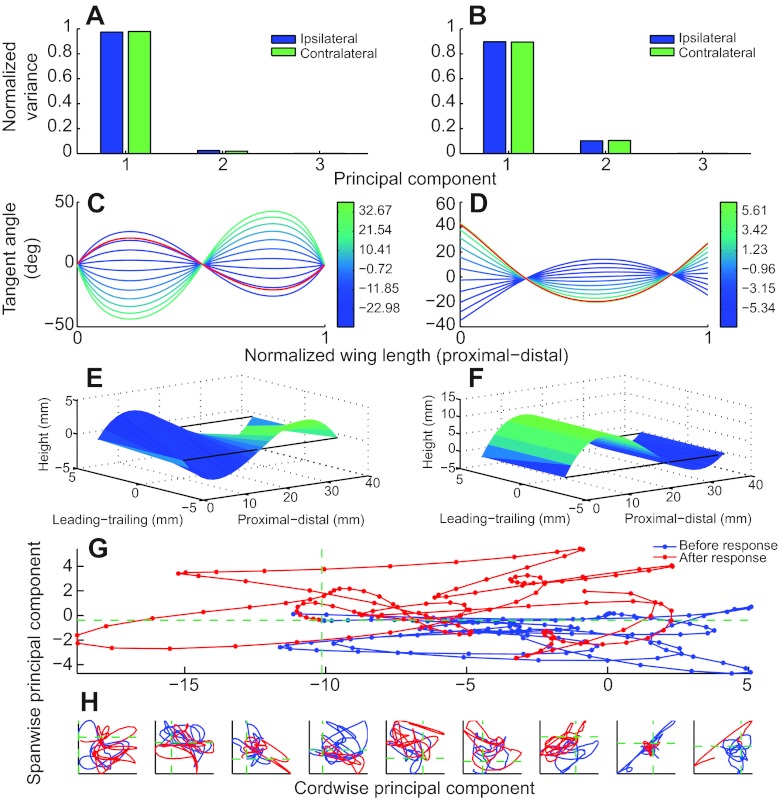
Visually guided collision avoidance is of paramount importance in flight, for instance to allow escape from potential predators. Yet, little is known about the types of collision-avoidance behaviors that may be generated by flying animals in response to an impending visual threat. We studied the behavior of minimally restrained locusts flying in a wind tunnel as they were subjected to looming stimuli presented to the side of the animal, simulating the approach of an object on a collision course. Using high-speed movie recordings, we observed a wide variety of collision-avoidance behaviors including climbs and dives away from - but also towards - the stimulus. In a more restrained setting, we were able to relate kinematic parameters of the flapping wings with yaw changes in the trajectory of the animal. Asymmetric wing flapping was most strongly correlated with changes in yaw, but we also observed a substantial effect of wing deformations. Additionally, the effect of wing deformations on yaw was relatively independent of that of wing asymmetries. Thus, flying locusts exhibit a rich range of collision-avoidance behaviors that depend on several distinct aerodynamic characteristics of wing flapping flight.
Figures
References
-
- Akaike H. (1974). A new look at the statistical model identification. IEEE Trans. Automat. Contr. 19, 716–723
-
- Baker P., Cooter R. (1979). The natural flight of the migratory locust, Locusta migratoria L. II. Gliding. J. Comp. Physiol. A Neuroethol. Sens. Neural Behav. Physiol. 131, 89–94
-
- Branson D. H. (2005). Direct and indirect effects of avian predation on grasshopper communities in northern mixed-grass prairie. Environ. Entomol. 34, 1114–1121
-
- Burrows M. (1996). The Neurobiology of an Insect Brain. Oxford, UK: Oxford University Press;
-
- Camhi J., Tom W. (1978). The escape behavior of the cockroach Periplaneta americana. J. Comp. Physiol. A Neuroethol. Sens. Neural Behav. Physiol. 128, 203–212 - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
