

A bat algorithm with mutation for UCAV path planning
- PMID: 23365518
- PMCID: PMC3543789
- DOI: 10.1100/2012/418946
A bat algorithm with mutation for UCAV path planning
Abstract
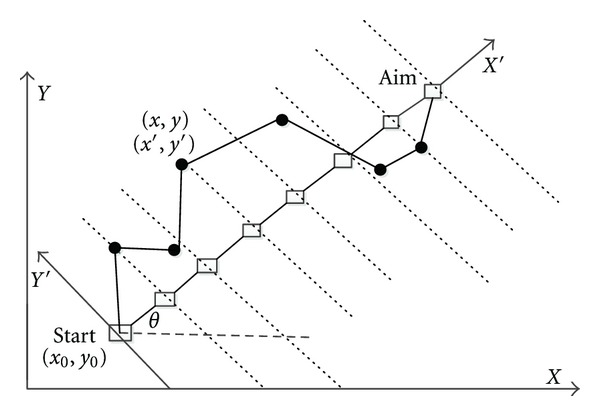
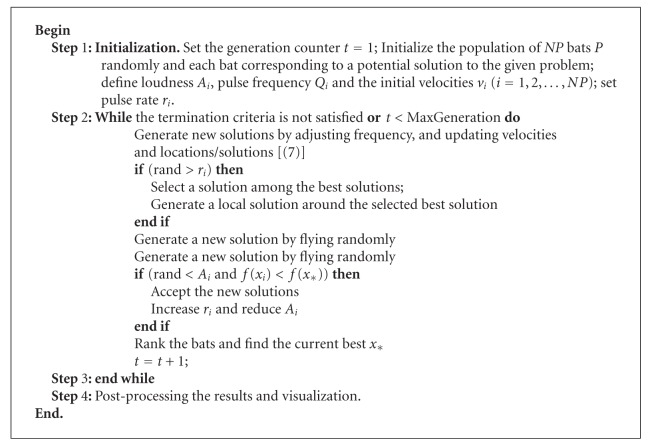
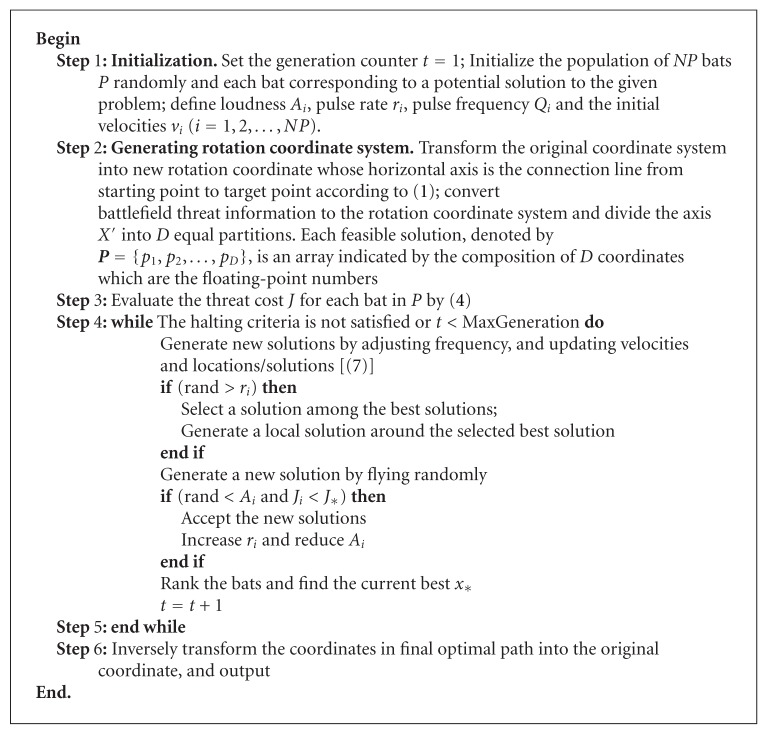
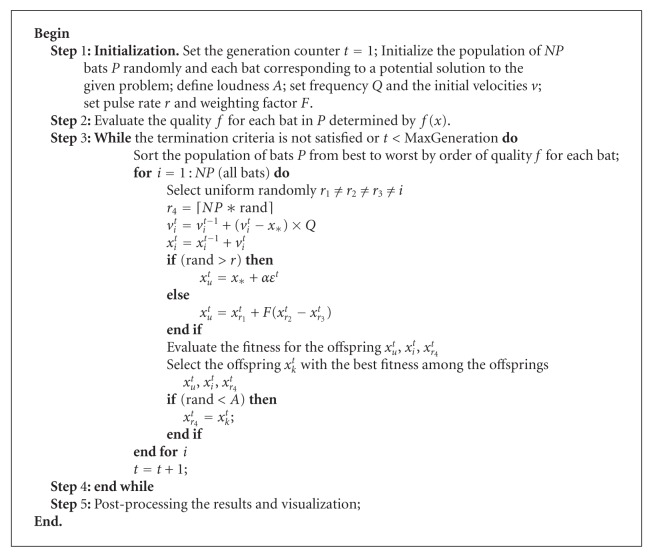
Path planning for uninhabited combat air vehicle (UCAV) is a complicated high dimension optimization problem, which mainly centralizes on optimizing the flight route considering the different kinds of constrains under complicated battle field environments. Original bat algorithm (BA) is used to solve the UCAV path planning problem. Furthermore, a new bat algorithm with mutation (BAM) is proposed to solve the UCAV path planning problem, and a modification is applied to mutate between bats during the process of the new solutions updating. Then, the UCAV can find the safe path by connecting the chosen nodes of the coordinates while avoiding the threat areas and costing minimum fuel. This new approach can accelerate the global convergence speed while preserving the strong robustness of the basic BA. The realization procedure for original BA and this improved metaheuristic approach BAM is also presented. To prove the performance of this proposed metaheuristic method, BAM is compared with BA and other population-based optimization methods, such as ACO, BBO, DE, ES, GA, PBIL, PSO, and SGA. The experiment shows that the proposed approach is more effective and feasible in UCAV path planning than the other models.
Figures

Similar articles
-
An improved artificial bee colony algorithm based on balance-evolution strategy for unmanned combat aerial vehicle path planning.ScientificWorldJournal. 2014 Mar 20;2014:232704. doi: 10.1155/2014/232704. eCollection 2014. ScientificWorldJournal. 2014. PMID: 24790555 Free PMC article.
-
A hybrid metaheuristic DE/CS algorithm for UCAV three-dimension path planning.ScientificWorldJournal. 2012;2012:583973. doi: 10.1100/2012/583973. Epub 2012 Oct 21. ScientificWorldJournal. 2012. PMID: 23193383 Free PMC article.
-
Three-Dimensional Path Planning for Uninhabited Combat Aerial Vehicle Based on Predator-Prey Pigeon-Inspired Optimization in Dynamic Environment.IEEE/ACM Trans Comput Biol Bioinform. 2017 Jan-Feb;14(1):97-107. doi: 10.1109/TCBB.2015.2443789. IEEE/ACM Trans Comput Biol Bioinform. 2017. PMID: 28182546
-
A Systematic and Meta-Analysis Survey of Whale Optimization Algorithm.Comput Intell Neurosci. 2019 Apr 28;2019:8718571. doi: 10.1155/2019/8718571. eCollection 2019. Comput Intell Neurosci. 2019. PMID: 31231431 Free PMC article.
-
Improved Sparrow Algorithm Based on Game Predatory Mechanism and Suicide Mechanism.Comput Intell Neurosci. 2022 May 16;2022:4925416. doi: 10.1155/2022/4925416. eCollection 2022. Comput Intell Neurosci. 2022. PMID: 35615547 Free PMC article. Review.
Cited by
-
An improved artificial bee colony algorithm based on balance-evolution strategy for unmanned combat aerial vehicle path planning.ScientificWorldJournal. 2014 Mar 20;2014:232704. doi: 10.1155/2014/232704. eCollection 2014. ScientificWorldJournal. 2014. PMID: 24790555 Free PMC article.
-
Percentile-Based Adaptive Immune Plasma Algorithm and Its Application to Engineering Optimization.Biomimetics (Basel). 2023 Oct 14;8(6):486. doi: 10.3390/biomimetics8060486. Biomimetics (Basel). 2023. PMID: 37887617 Free PMC article.
-
Discrete bat algorithm for optimal problem of permutation flow shop scheduling.ScientificWorldJournal. 2014;2014:630280. doi: 10.1155/2014/630280. Epub 2014 Aug 27. ScientificWorldJournal. 2014. PMID: 25243220 Free PMC article.
-
A Novel Technique for Drone Path Planning Based on a Neighborhood Dragonfly Algorithm.Sensors (Basel). 2025 Jan 31;25(3):863. doi: 10.3390/s25030863. Sensors (Basel). 2025. PMID: 39943501 Free PMC article.
-
Gust mitigation of micro air vehicles using passive articulated wings.ScientificWorldJournal. 2014 Jan 2;2014:598523. doi: 10.1155/2014/598523. eCollection 2014. ScientificWorldJournal. 2014. PMID: 24516368 Free PMC article.
References
-
- Duan HB, Zhang XY, Xu CF. Bio-Inspired Computing. Beijing, China: Science Press; 2011.
-
- Wang G, Guo L, Duan H, Liu L, Wang H, Shao M. Path planning for uninhabited combat aerial vehicle using hybrid meta-heuristic DE/BBO algorithm. Advanced Science, Engineering and Medicine. 2012;4(6):550–564.
-
- Wang G, Guo L, Duan H, Liu L, Wang H, Shao M. Hybridizing harmony search with biogeography based optimization for global numerical optimization. Journal of Computational and Theoretical Nanoscience. In press.
-
- Pehlivanoglu YV. A new vibrational genetic algorithm enhanced with a Voronoi diagram for path planning of autonomous UAV. Aerospace Science and Technology. 2012;16:47–55.
-
- Ye W, Ma DW, Fan HD. Algorithm for low altitude penetration aircraft path planning with improved ant colony algorithm. Chinese Journal of Aeronautics. 2005;18(4):304–309.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Miscellaneous
