

Enhancing stance phase propulsion during level walking by combining FES with a powered exoskeleton for persons with paraplegia
- PMID: 23365900
- PMCID: PMC3694438
- DOI: 10.1109/EMBC.2012.6345939
Enhancing stance phase propulsion during level walking by combining FES with a powered exoskeleton for persons with paraplegia
Abstract
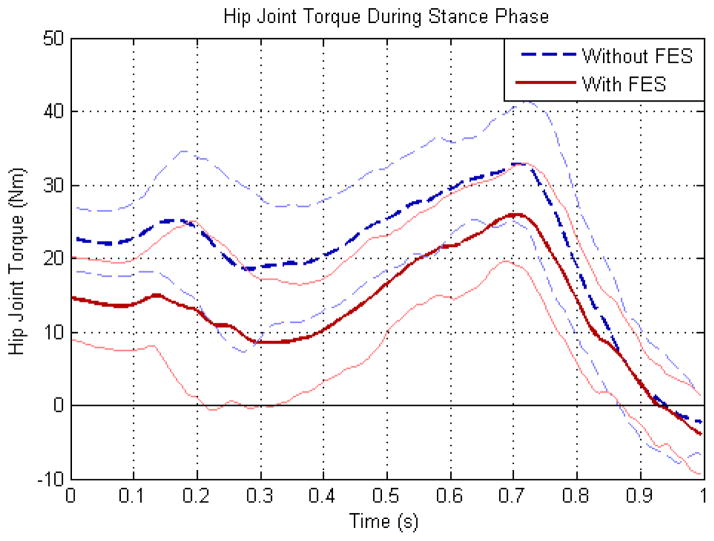
This paper describes the design and implementation of a cooperative controller that combines functional electrical stimulation (FES) with a powered lower limb exoskeleton to provide enhanced hip extension during the stance phase of walking in persons with paraplegia. The controller utilizes two sources of actuation: the electric motors of the powered exoskeleton and the user's machine (FSM), a set of FES. It consists of a finite-state machine (FSM), a set of proportional-derivative (PD) controllers for the exoskeleton and a cycle-to-cycle adaptive controller for muscle stimulation. Level ground walking is conducted on a single subject with complete T10 paraplegia. Results show a 34% reduction in electrical power requirements at the hip joints during the stance phase of the gait cycle with the cooperative controller compared to using electric motors alone.
Figures





References
-
- Ragnarsson KT. Functional electrical stimulation after spinal cord injury: current use, therapeutic effects and future directions. Spinal Cord. 2008 Apr;46:255–74. - PubMed
-
- Peckham PH, Knutson JS. Functional electrical stimulation for neuromuscular applications. Annual Review of Biomedical Engineering. 2005;7:327–360. - PubMed
-
- Cybulski GR, Penn RD, Jaeger RJ. Lower extremity functional neuromuscular stimulation in cases of spinal cord injury. Neurosurgery. 1984 Jul;15:132–46. - PubMed
-
- Graupe D, Kohn KH. Functional neuromuscular stimulator for short-distance ambulation by certain thoracic-level spinal-cord-injured paraplegics. Surg Neurol. 1998 Sep;50:202–7. - PubMed
-
- Kralj AR, Bajd T. Functional electrical stimulation : standing and walking after spinal cord injury. Boca Raton, Fla: CRC Press; 1989.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
Research Materials
Miscellaneous