

Force sensing micro-forceps for robot assisted retinal surgery
- PMID: 23366162
- PMCID: PMC3957212
- DOI: 10.1109/EMBC.2012.6346201
Force sensing micro-forceps for robot assisted retinal surgery
Abstract
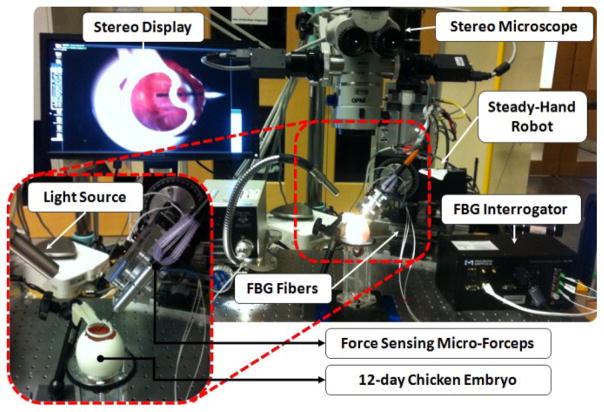
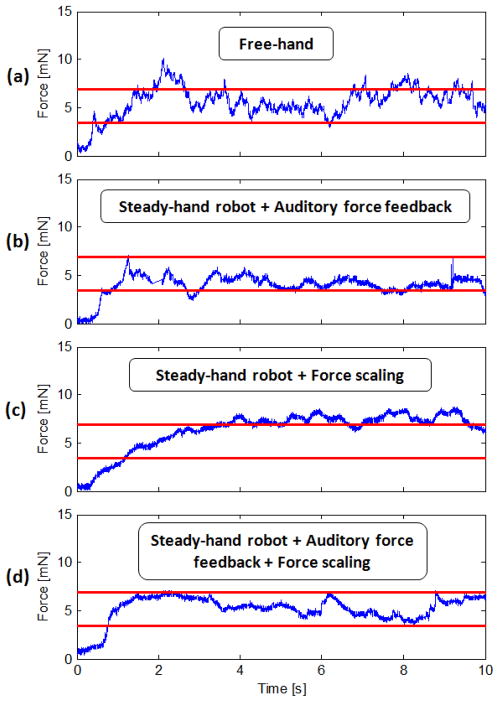
Membrane peeling is a standard vitreoretinal procedure, where the surgeon delaminates a very thin membrane from retina surface using surgical picks and forceps. This requires extremely delicate manipulation of the retinal tissue. Applying excessive forces during the surgery can cause serious complications leading to vision loss. For successful membrane peeling, most of the applied forces need to be very small, well below the human tactile sensation threshold. In this paper, we present a robotic system that combines a force sensing forceps tool and a cooperatively-controlled surgical robot. This combination allows us to measure the forces directly at the tool tip and use this information for limiting the applied forces on the retina. This may prevent many iatrogenic injuries and allow safer maneuvers during vitreoretinal procedures. We show that our system can successfully eliminate hand-tremor and excessive forces in membrane peeling experiments on the inner shell membrane of a chicken embryo.
Figures
Similar articles
-
Design of 3-DOF force sensing micro-forceps for robot assisted vitreoretinal surgery.Annu Int Conf IEEE Eng Med Biol Soc. 2013;2013:5686-9. doi: 10.1109/EMBC.2013.6610841. Annu Int Conf IEEE Eng Med Biol Soc. 2013. PMID: 24111028 Free PMC article.
-
Cooperative robot assistant for retinal microsurgery.Med Image Comput Comput Assist Interv. 2008;11(Pt 2):543-50. doi: 10.1007/978-3-540-85990-1_65. Med Image Comput Comput Assist Interv. 2008. PMID: 18982647
-
Micro-force sensing in robot assisted membrane peeling for vitreoretinal surgery.Med Image Comput Comput Assist Interv. 2010;13(Pt 3):303-10. doi: 10.1007/978-3-642-15711-0_38. Med Image Comput Comput Assist Interv. 2010. PMID: 20879413 Free PMC article.
-
Microsurgical robotic system for vitreoretinal surgery.Int J Comput Assist Radiol Surg. 2012 Jan;7(1):27-34. doi: 10.1007/s11548-011-0602-4. Epub 2011 May 15. Int J Comput Assist Radiol Surg. 2012. PMID: 21573828 Review.
-
Robot-assisted tremor control for performance enhancement of retinal microsurgeons.Br J Ophthalmol. 2019 Aug;103(8):1195-1200. doi: 10.1136/bjophthalmol-2018-313318. Epub 2018 Dec 20. Br J Ophthalmol. 2019. PMID: 30573495 Review.
Cited by
-
Robot-Assisted Pterygium Surgery: Feasibility Study in a Nonliving Porcine Model.Transl Vis Sci Technol. 2015 Feb 24;4(1):9. doi: 10.1167/tvst.4.1.9. eCollection 2015 Feb. Transl Vis Sci Technol. 2015. PMID: 25722953 Free PMC article.
-
Towards Robot-Assisted Retinal Vein Cannulation: A Motorized Force-Sensing Microneedle Integrated with a Handheld Micromanipulator †.Sensors (Basel). 2017 Sep 23;17(10):2195. doi: 10.3390/s17102195. Sensors (Basel). 2017. PMID: 28946634 Free PMC article.
-
Motorized Force-Sensing Micro-Forceps with Tremor Cancelling and Controlled Micro-Vibrations for Easier Membrane Peeling.Proc IEEE RAS EMBS Int Conf Biomed Robot Biomechatron. 2014 Aug;2014:244-251. doi: 10.1109/BIOROB.2014.6913784. Proc IEEE RAS EMBS Int Conf Biomed Robot Biomechatron. 2014. PMID: 25544965 Free PMC article.
-
Force-Sensing Microneedle for Assisted Retinal Vein Cannulation*.Proc IEEE Sens. 2014 Nov;2014:698-701. doi: 10.1109/ICSENS.2014.6985095. Proc IEEE Sens. 2014. PMID: 25580178 Free PMC article.
-
Intraocular Microsurgical Forceps (20, 23, and 25 gauge) Membrane Peeling Forces Assessment.J Ophthalmol. 2013;2013:784172. doi: 10.1155/2013/784172. Epub 2013 Jun 24. J Ophthalmol. 2013. PMID: 23956842 Free PMC article.
References
-
- Kirchhof B, Wong D. Vitreo-retinal surgery. Springer; 2005.
-
- Tano Y, Kamei M, Ooji M, Saitou Y, Won PI, Lewis JM. Membrane eraser. Jul, 1999.
-
- Ueta, Yamaguchi Y, Shirakawa Y, Nakano T, Ideta R, Noda Y, Morita A, Mochizuki R, Sugita N, Mitsuishi M. Robot-assisted vitreoretinal surgery development of a prototype and feasibility studies in an animal model. Ophthalmology. 2009 Aug;116:1538–1543.e2. - PubMed
-
- Riviere C, Ang WT, Khosla P. Toward active tremor canceling in handheld microsurgical instruments. Robotics and Automation, IEEE Transactions on. 2003 Oct;19:793–800.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources