

Starling flock networks manage uncertainty in consensus at low cost
- PMID: 23382667
- PMCID: PMC3561045
- DOI: 10.1371/journal.pcbi.1002894
Starling flock networks manage uncertainty in consensus at low cost
Abstract
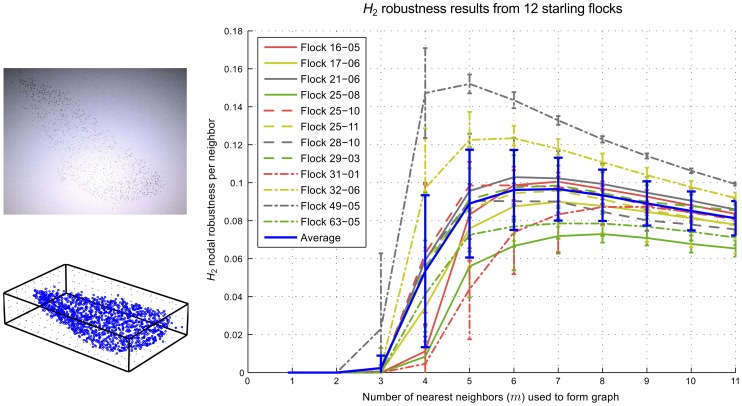
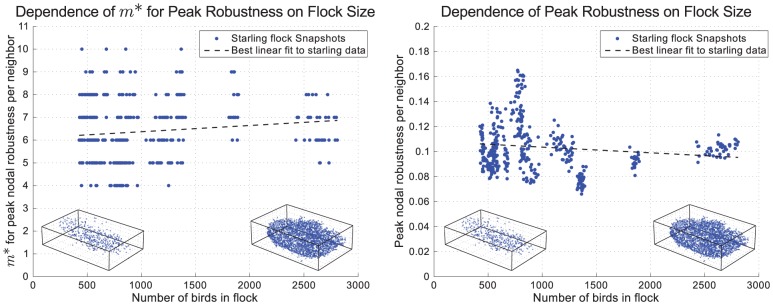
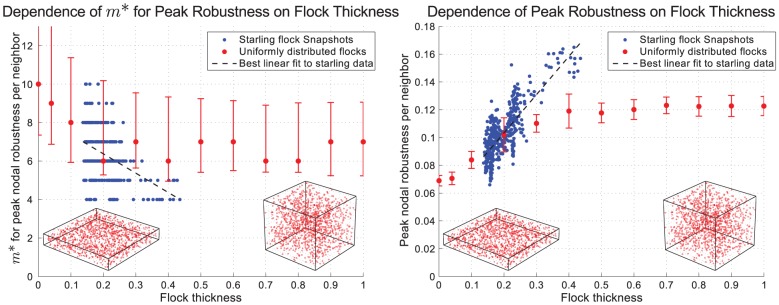
Flocks of starlings exhibit a remarkable ability to maintain cohesion as a group in highly uncertain environments and with limited, noisy information. Recent work demonstrated that individual starlings within large flocks respond to a fixed number of nearest neighbors, but until now it was not understood why this number is seven. We analyze robustness to uncertainty of consensus in empirical data from multiple starling flocks and show that the flock interaction networks with six or seven neighbors optimize the trade-off between group cohesion and individual effort. We can distinguish these numbers of neighbors from fewer or greater numbers using our systems-theoretic approach to measuring robustness of interaction networks as a function of the network structure, i.e., who is sensing whom. The metric quantifies the disagreement within the network due to disturbances and noise during consensus behavior and can be evaluated over a parameterized family of hypothesized sensing strategies (here the parameter is number of neighbors). We use this approach to further show that for the range of flocks studied the optimal number of neighbors does not depend on the number of birds within a flock; rather, it depends on the shape, notably the thickness, of the flock. The results suggest that robustness to uncertainty may have been a factor in the evolution of flocking for starlings. More generally, our results elucidate the role of the interaction network on uncertainty management in collective behavior, and motivate the application of our approach to other biological networks.
Conflict of interest statement
The authors have declared that no competing interests exist.
Figures
References
-
- Partridge B (1981) Internal dynamics and the interrelations of fish in schools. J Comp Physiol A Neuroethol Sens Neural Behav Physiol 144: 313–325.
-
- Partridge B, Pitcher T, Cullen J, Wilson J (1980) The three-dimensional structure of fish schools. Behav Ecol Sociobiol 6: 277–288.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
