

Neural control and adaptive neural forward models for insect-like, energy-efficient, and adaptable locomotion of walking machines
- PMID: 23408775
- PMCID: PMC3570936
- DOI: 10.3389/fncir.2013.00012
Neural control and adaptive neural forward models for insect-like, energy-efficient, and adaptable locomotion of walking machines
Abstract
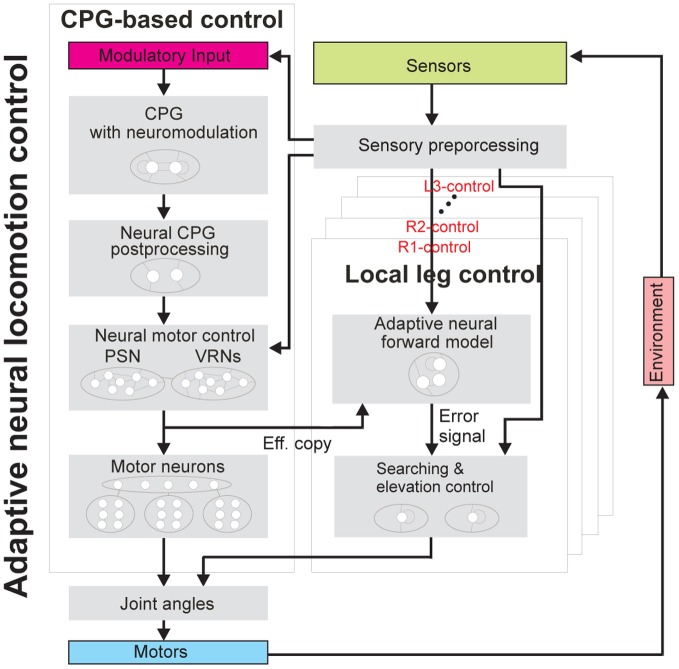
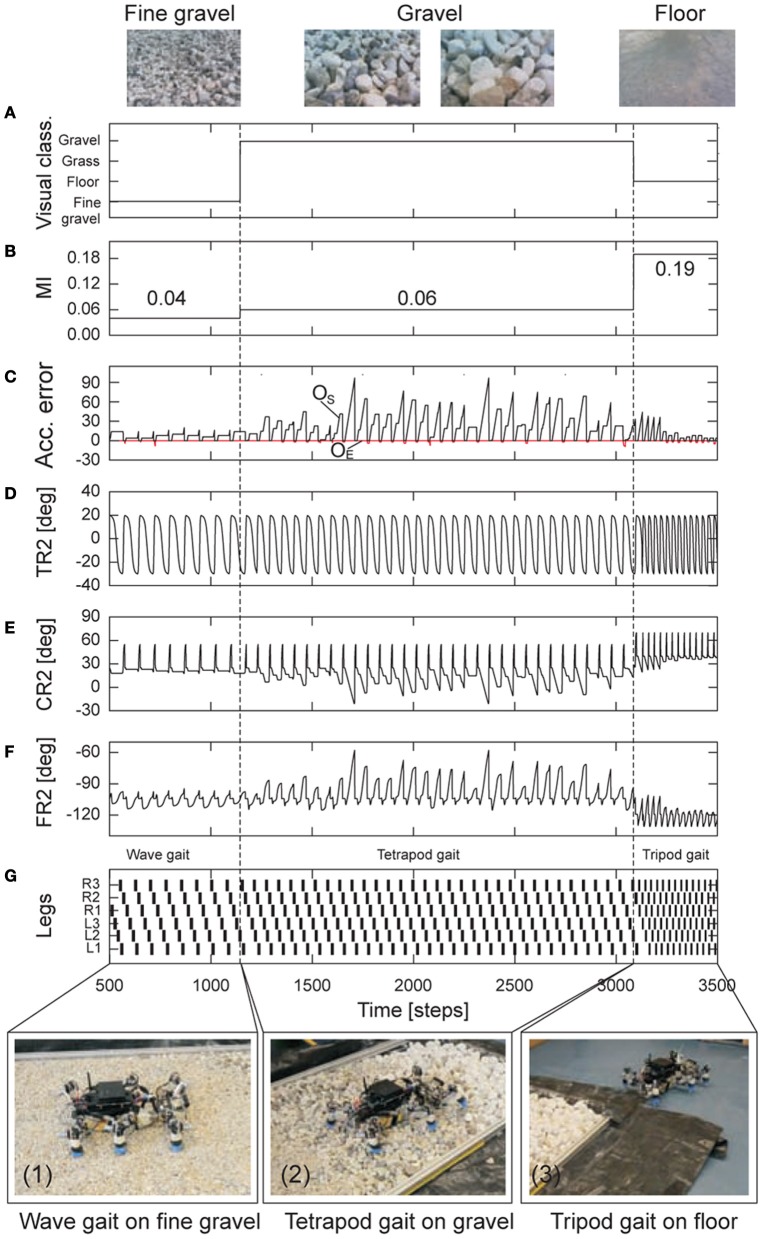
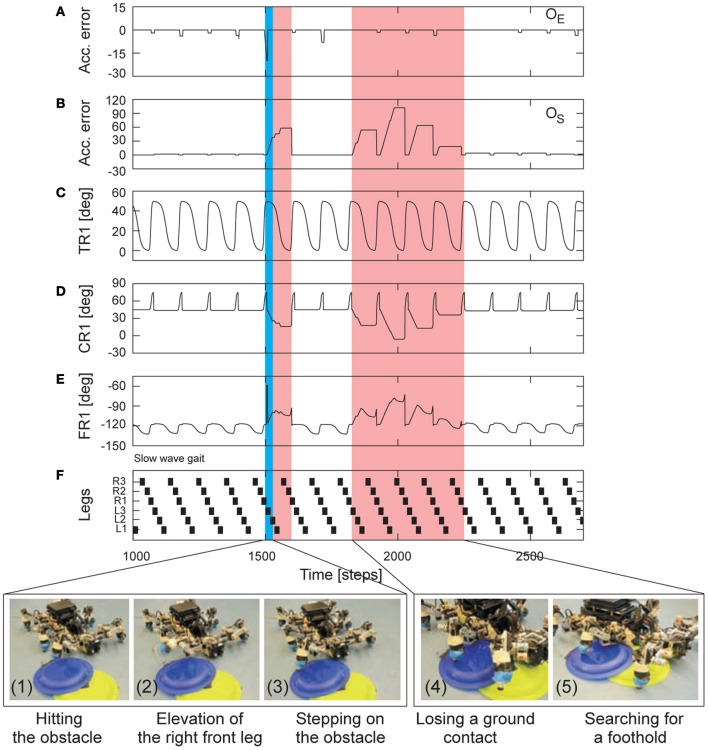
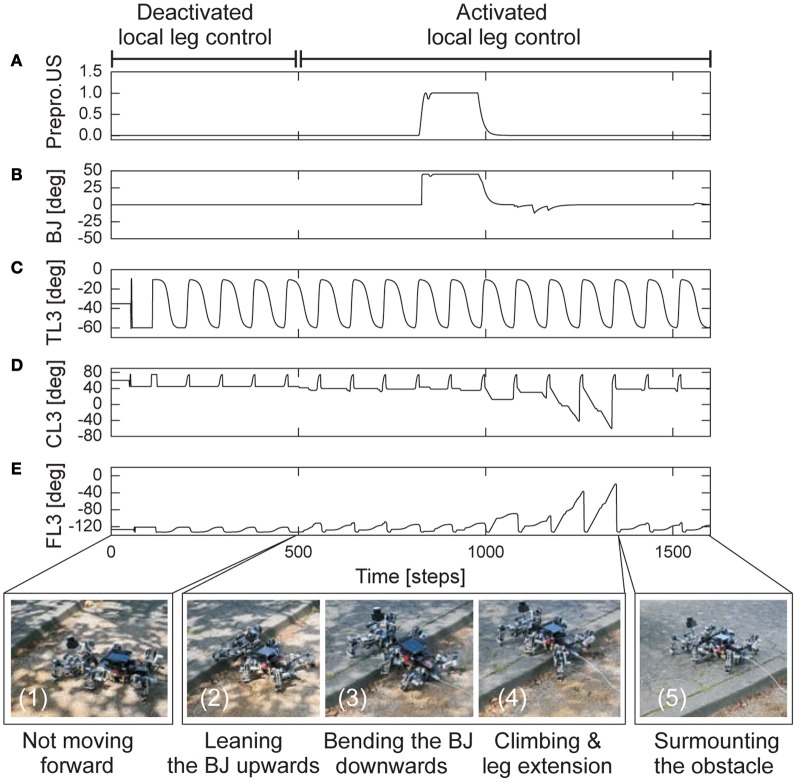
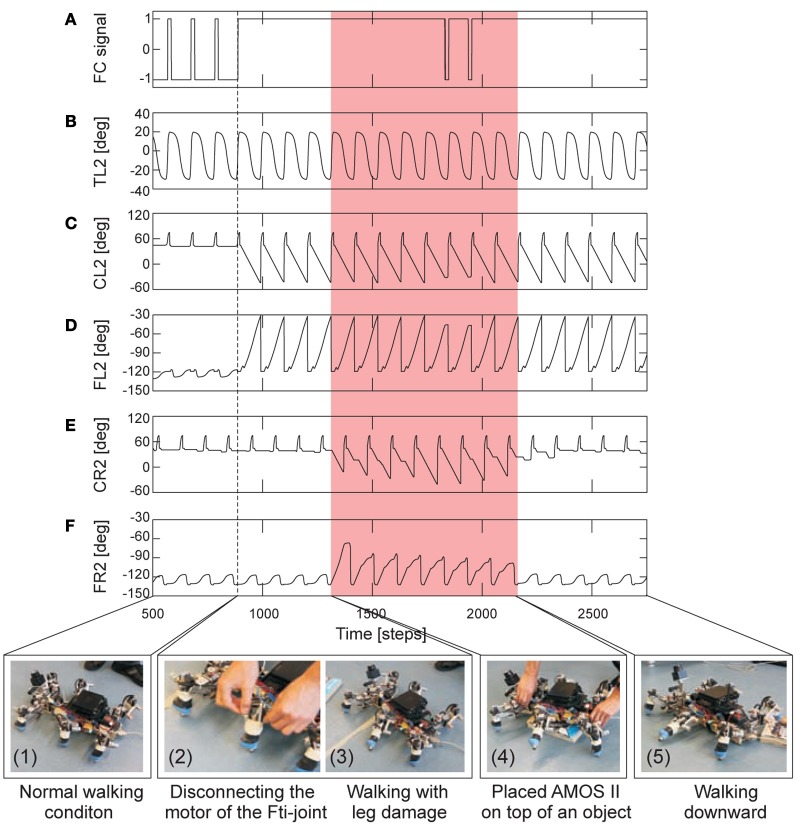
Living creatures, like walking animals, have found fascinating solutions for the problem of locomotion control. Their movements show the impression of elegance including versatile, energy-efficient, and adaptable locomotion. During the last few decades, roboticists have tried to imitate such natural properties with artificial legged locomotion systems by using different approaches including machine learning algorithms, classical engineering control techniques, and biologically-inspired control mechanisms. However, their levels of performance are still far from the natural ones. By contrast, animal locomotion mechanisms seem to largely depend not only on central mechanisms (central pattern generators, CPGs) and sensory feedback (afferent-based control) but also on internal forward models (efference copies). They are used to a different degree in different animals. Generally, CPGs organize basic rhythmic motions which are shaped by sensory feedback while internal models are used for sensory prediction and state estimations. According to this concept, we present here adaptive neural locomotion control consisting of a CPG mechanism with neuromodulation and local leg control mechanisms based on sensory feedback and adaptive neural forward models with efference copies. This neural closed-loop controller enables a walking machine to perform a multitude of different walking patterns including insect-like leg movements and gaits as well as energy-efficient locomotion. In addition, the forward models allow the machine to autonomously adapt its locomotion to deal with a change of terrain, losing of ground contact during stance phase, stepping on or hitting an obstacle during swing phase, leg damage, and even to promote cockroach-like climbing behavior. Thus, the results presented here show that the employed embodied neural closed-loop system can be a powerful way for developing robust and adaptable machines.
Keywords: autonomous robots; central pattern generators; efference copy; local leg control; recurrent neural networks; sensory feedback; walking gait.
Figures
References
-
- Alexander R. (1982). Locomotion of Animals. Glasgow: Blackie
-
- Beer R., Quinn R., Chiel H., Ritzmann R. (1997). Biologically inspired approaches to robotics: what can we learn from insects? Commun. ACM 40, 30–38
-
- Bläsing B. (2006). Crossing large gaps: a simulation study of stick insect behavior. Adapt. Behav. 14, 265–286
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources