

A simple exoskeleton that assists plantarflexion can reduce the metabolic cost of human walking
- PMID: 23418524
- PMCID: PMC3571952
- DOI: 10.1371/journal.pone.0056137
A simple exoskeleton that assists plantarflexion can reduce the metabolic cost of human walking
Abstract
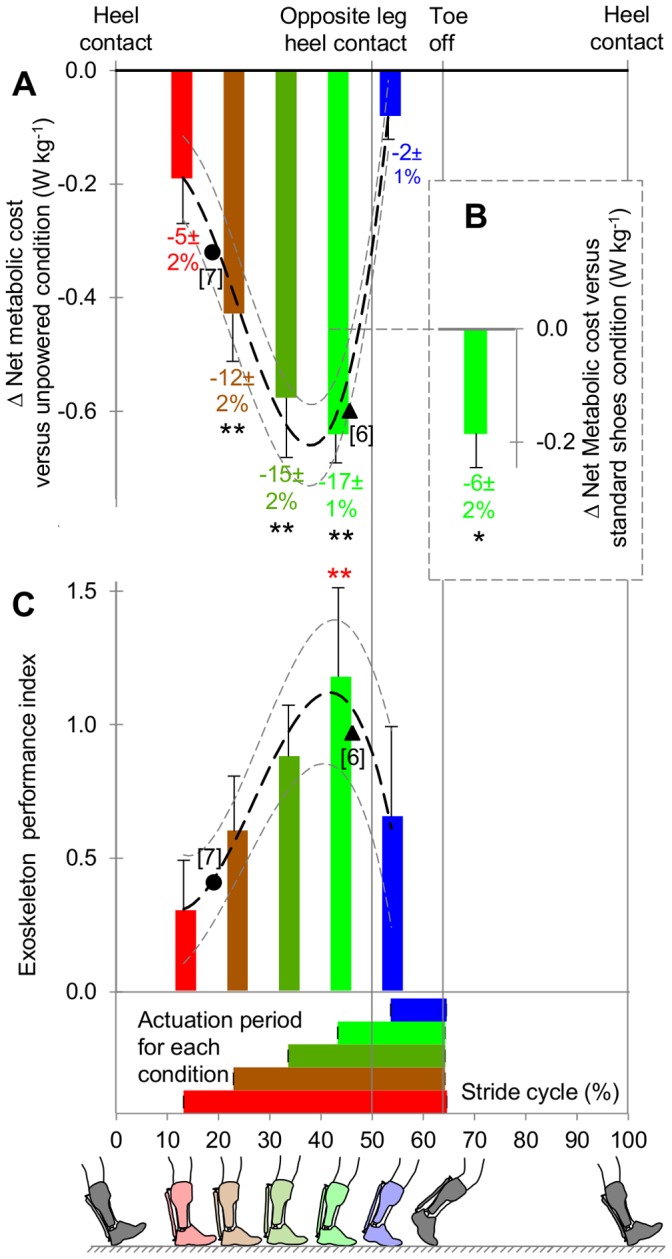
Background: Even though walking can be sustained for great distances, considerable energy is required for plantarflexion around the instant of opposite leg heel contact. Different groups attempted to reduce metabolic cost with exoskeletons but none could achieve a reduction beyond the level of walking without exoskeleton, possibly because there is no consensus on the optimal actuation timing. The main research question of our study was whether it is possible to obtain a higher reduction in metabolic cost by tuning the actuation timing.
Methodology/principal findings: We measured metabolic cost by means of respiratory gas analysis. Test subjects walked with a simple pneumatic exoskeleton that assists plantarflexion with different actuation timings. We found that the exoskeleton can reduce metabolic cost by 0.18±0.06 W kg(-1) or 6±2% (standard error of the mean) (p = 0.019) below the cost of walking without exoskeleton if actuation starts just before opposite leg heel contact.
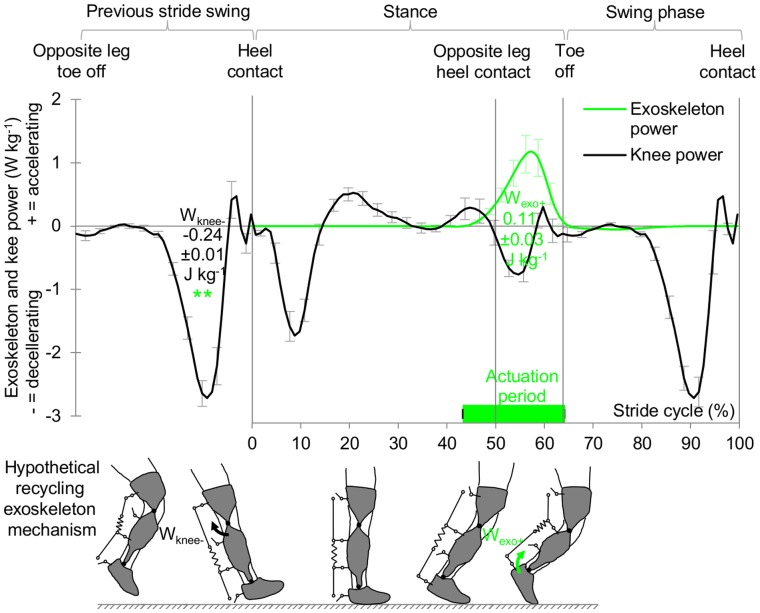
Conclusions/significance: The optimum timing that we found concurs with the prediction from a mathematical model of walking. While the present exoskeleton was not ambulant, measurements of joint kinetics reveal that the required power could be recycled from knee extension deceleration work that occurs naturally during walking. This demonstrates that it is theoretically possible to build future ambulant exoskeletons that reduce metabolic cost, without power supply restrictions.
Conflict of interest statement
Figures
References
-
- Hreljac A (1993) Preferred and energetically optimal gait transition speeds in human locomotion. Med Sci Sports Exerc 25: 1158–1162. - PubMed
-
- Fornaris E, Aubert M (1998) Le légionnaire romain, cet athlète méconnu. Hist Sci Med 32: 161–168. - PubMed
-
- Cavagna GA, Heglund NC, Taylor CR (1977) Mechanical work in terrestrial locomotion: two basic mechanisms for minimizing energy expenditure. Am J Physiol 233: R243–R261. - PubMed
-
- Bogue R (2009) Exoskeletons and robotic prosthetics: a review of recent developments. Ind Rob 36: 421–427 doi http://dx.doi.org/10.1108/01439910910980141. - DOI
-
- Ferris DP (2009) The exoskeletons are here. J Neuroeng Rehabil 6: 17 doi:10.1186/1743-0003-6-17. - DOI - PMC - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
