

SAD-based stereo vision machine on a System-on-Programmable-Chip (SoPC)
- PMID: 23459385
- PMCID: PMC3658728
- DOI: 10.3390/s130303014
SAD-based stereo vision machine on a System-on-Programmable-Chip (SoPC)
Abstract
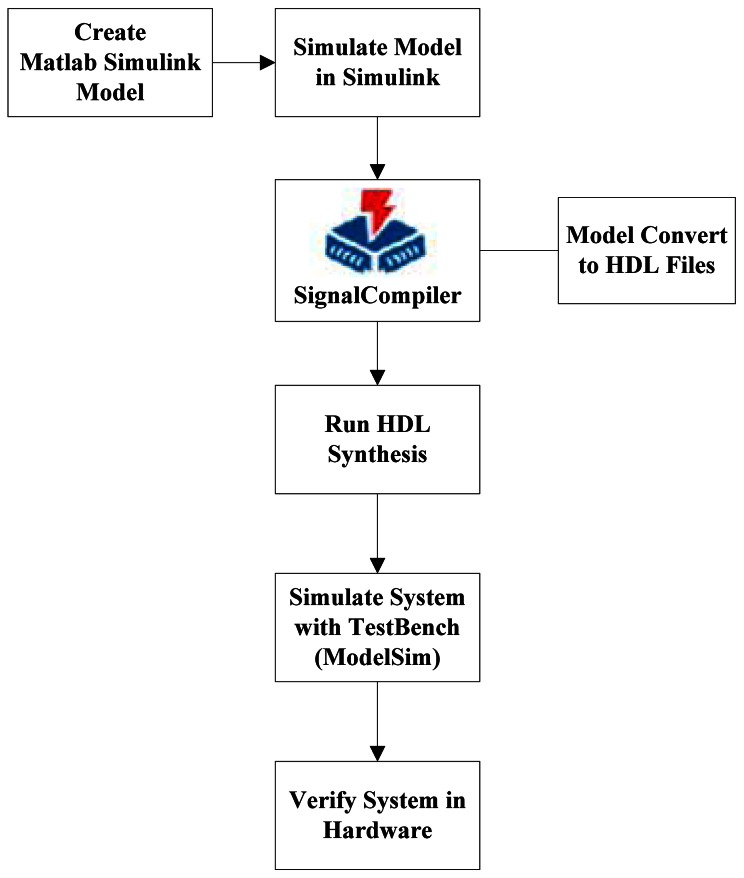
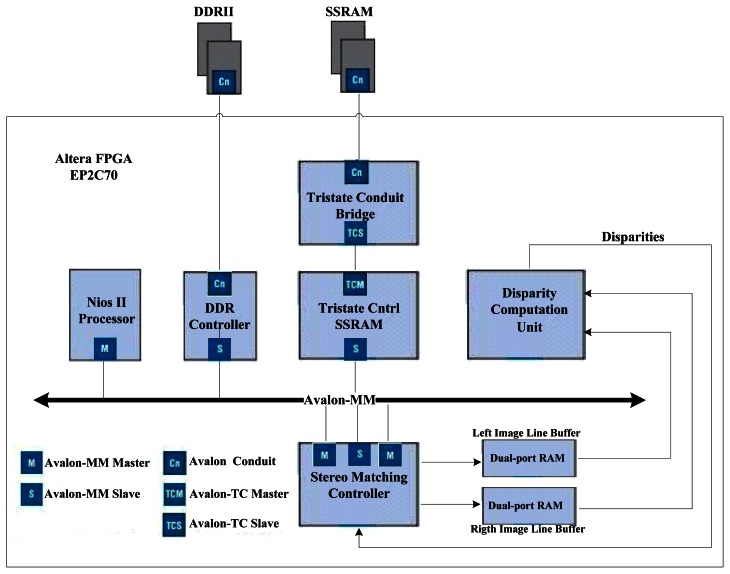
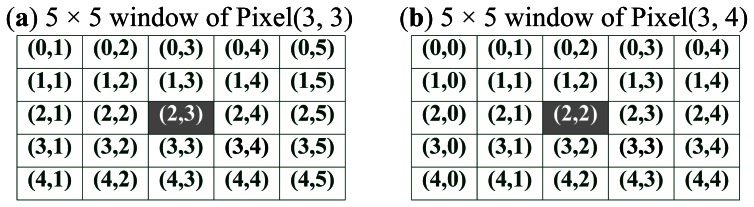
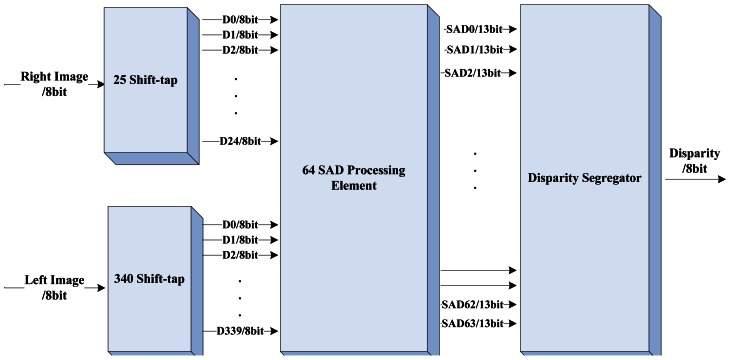
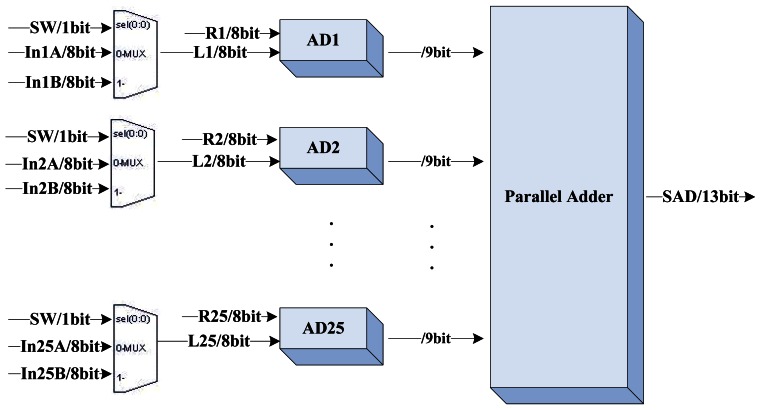
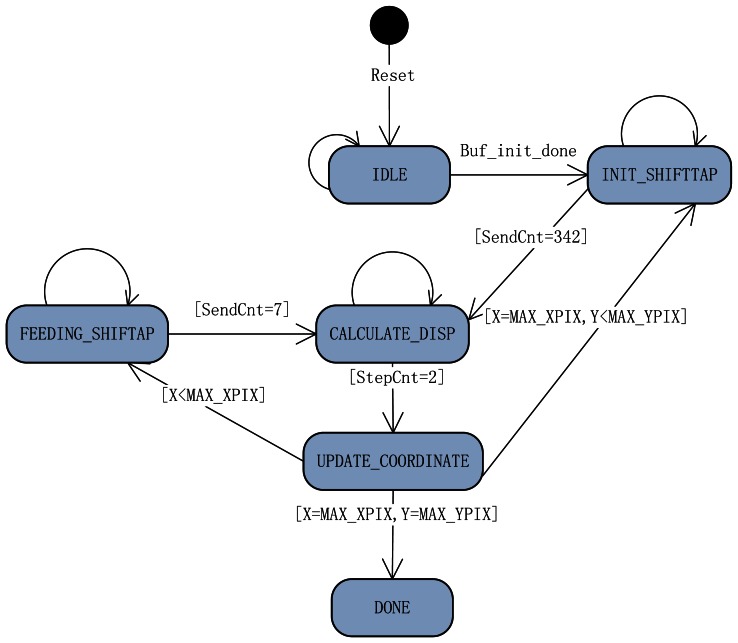
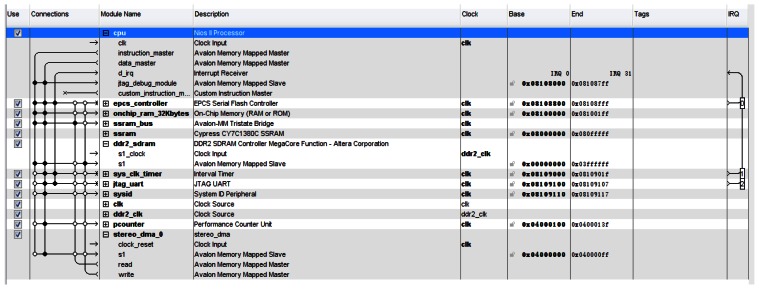
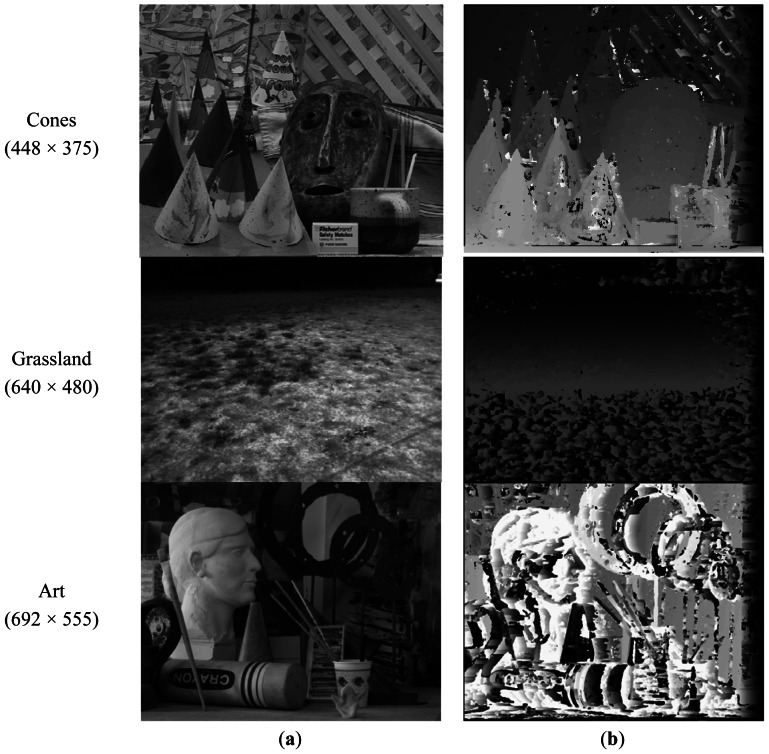
This paper, proposes a novel solution for a stereo vision machine based on the System-on-Programmable-Chip (SoPC) architecture. The SOPC technology provides great convenience for accessing many hardware devices such as DDRII, SSRAM, Flash, etc., by IP reuse. The system hardware is implemented in a single FPGA chip involving a 32-bit Nios II microprocessor, which is a configurable soft IP core in charge of managing the image buffer and users' configuration data. The Sum of Absolute Differences (SAD) algorithm is used for dense disparity map computation. The circuits of the algorithmic module are modeled by the Matlab-based DSP Builder. With a set of configuration interfaces, the machine can process many different sizes of stereo pair images. The maximum image size is up to 512 K pixels. This machine is designed to focus on real time stereo vision applications. The stereo vision machine offers good performance and high efficiency in real time. Considering a hardware FPGA clock of 90 MHz, 23 frames of 640 × 480 disparity maps can be obtained in one second with 5 × 5 matching window and maximum 64 disparity pixels.
Figures


Similar articles
-
Parametric dense stereovision implementation on a system-on chip (SoC).Sensors (Basel). 2012;12(2):1863-84. doi: 10.3390/s120201863. Epub 2012 Feb 10. Sensors (Basel). 2012. PMID: 22438742 Free PMC article.
-
Real-Time FPGA Accelerated Stereo Matching for Temporal Statistical Pattern Projector Systems.Sensors (Basel). 2021 Sep 26;21(19):6435. doi: 10.3390/s21196435. Sensors (Basel). 2021. PMID: 34640755 Free PMC article.
-
Disparity map generation from illumination variant stereo images using efficient hierarchical dynamic programming.ScientificWorldJournal. 2014;2014:513417. doi: 10.1155/2014/513417. Epub 2014 Oct 20. ScientificWorldJournal. 2014. PMID: 25386604 Free PMC article.
-
Machine learning algorithms for FPGA Implementation in biomedical engineering applications: A review.Heliyon. 2024 Feb 18;10(4):e26652. doi: 10.1016/j.heliyon.2024.e26652. eCollection 2024 Feb 29. Heliyon. 2024. PMID: 38434008 Free PMC article. Review.
-
Neuromorphic Stereo Vision: A Survey of Bio-Inspired Sensors and Algorithms.Front Neurorobot. 2019 May 28;13:28. doi: 10.3389/fnbot.2019.00028. eCollection 2019. Front Neurorobot. 2019. PMID: 31191287 Free PMC article. Review.
Cited by
-
The Impact of 3D Stacking and Technology Scaling on the Power and Area of Stereo Matching Processors.Sensors (Basel). 2017 Feb 22;17(2):426. doi: 10.3390/s17020426. Sensors (Basel). 2017. PMID: 28241437 Free PMC article.
-
Parallel Hough Transform-based straight line detection and its FPGA implementation in embedded vision.Sensors (Basel). 2013 Jul 17;13(7):9223-47. doi: 10.3390/s130709223. Sensors (Basel). 2013. PMID: 23867746 Free PMC article.
-
Monocular Stereo Measurement Using High-Speed Catadioptric Tracking.Sensors (Basel). 2017 Aug 9;17(8):1839. doi: 10.3390/s17081839. Sensors (Basel). 2017. PMID: 28792483 Free PMC article.
-
Stereo Imaging Using Hardwired Self-Organizing Object Segmentation.Sensors (Basel). 2020 Oct 15;20(20):5833. doi: 10.3390/s20205833. Sensors (Basel). 2020. PMID: 33076377 Free PMC article.
References
-
- Bertozzi M., Broggi A. GOLD: A parallel real-time stereo vision system for generic obstacle and lane detection. IEEE Trans. Image Process. 1998;7:62–81. - PubMed
-
- Murray D., Little J.J. Using real-time stereo vision for mobile robot navigation. Autonom. Rob. 2000;8:161–171.
-
- Yi J., Kim J., Li L., Morris J., Lee G., Leclercq P. Real-time three dimensional vision. Lect. Notes Comput. Sci. 2004;3189:309–320.
-
- Perri S., Colonna D., Zicari P., Corsonello P. SAD-Based Stereo Matching Circuit for FPGAs. Proceedings of the 13th IEEE International Conference on Electronics, Circuits and Systems; Nice, France. 10–13 December 2006; pp. 846–849.
-
- Darabiha A., Rose J., MacLean W.J. Video-Rate Stereo Depth Measurement on Programmable Hardware. Proceedings of the 2003 IEEE Computer Society Conference on Computer Vision and Pattern Recognition; Madison, WI, USA. 18–20 June 2003; pp. 203–210.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Miscellaneous
