

State-based decoding of hand and finger kinematics using neuronal ensemble and LFP activity during dexterous reach-to-grasp movements
- PMID: 23536714
- PMCID: PMC3680811
- DOI: 10.1152/jn.01038.2011
State-based decoding of hand and finger kinematics using neuronal ensemble and LFP activity during dexterous reach-to-grasp movements
Abstract
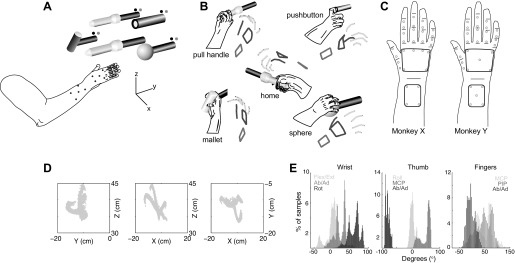
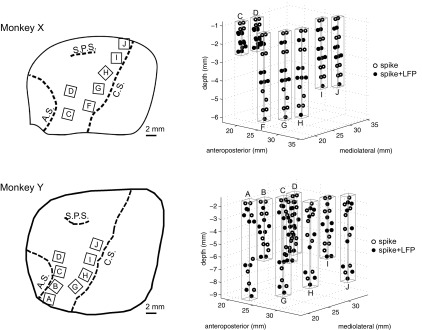
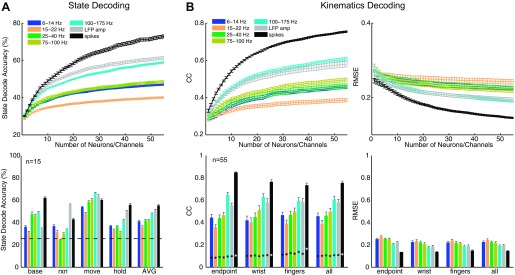
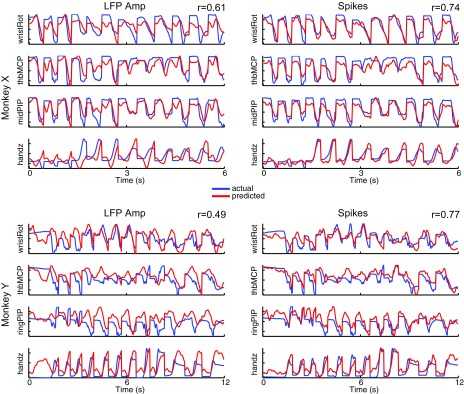
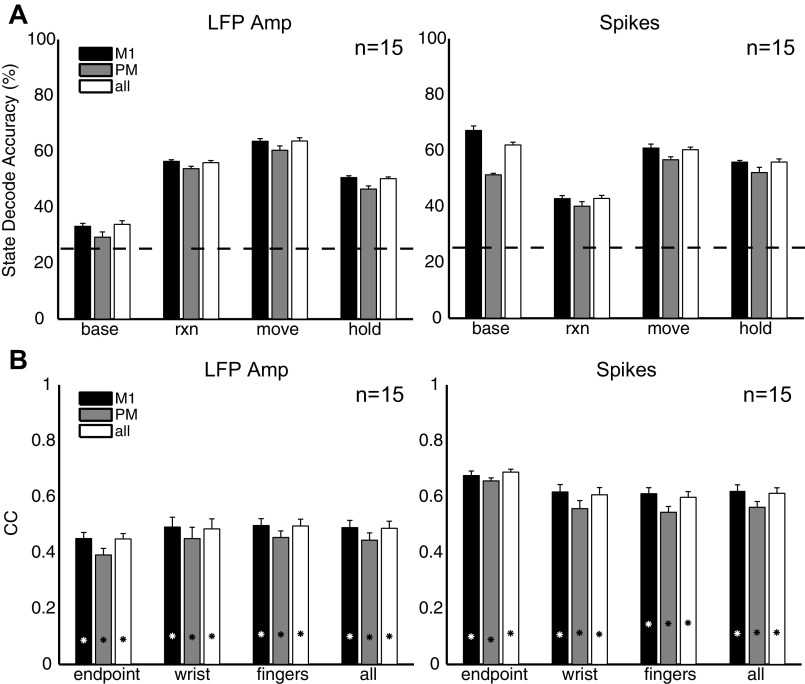
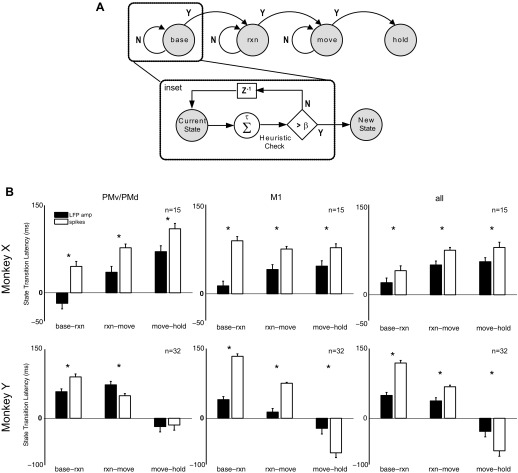
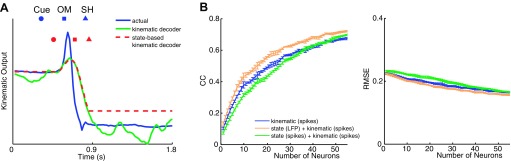
The performance of brain-machine interfaces (BMIs) that continuously control upper limb neuroprostheses may benefit from distinguishing periods of posture and movement so as to prevent inappropriate movement of the prosthesis. Few studies, however, have investigated how decoding behavioral states and detecting the transitions between posture and movement could be used autonomously to trigger a kinematic decoder. We recorded simultaneous neuronal ensemble and local field potential (LFP) activity from microelectrode arrays in primary motor cortex (M1) and dorsal (PMd) and ventral (PMv) premotor areas of two male rhesus monkeys performing a center-out reach-and-grasp task, while upper limb kinematics were tracked with a motion capture system with markers on the dorsal aspect of the forearm, hand, and fingers. A state decoder was trained to distinguish four behavioral states (baseline, reaction, movement, hold), while a kinematic decoder was trained to continuously decode hand end point position and 18 joint angles of the wrist and fingers. LFP amplitude most accurately predicted transition into the reaction (62%) and movement (73%) states, while spikes most accurately decoded arm, hand, and finger kinematics during movement. Using an LFP-based state decoder to trigger a spike-based kinematic decoder [r = 0.72, root mean squared error (RMSE) = 0.15] significantly improved decoding of reach-to-grasp movements from baseline to final hold, compared with either a spike-based state decoder combined with a spike-based kinematic decoder (r = 0.70, RMSE = 0.17) or a spike-based kinematic decoder alone (r = 0.67, RMSE = 0.17). Combining LFP-based state decoding with spike-based kinematic decoding may be a valuable step toward the realization of BMI control of a multifingered neuroprosthesis performing dexterous manipulation.
Keywords: brain-machine interface; movement decoding; neuroprosthetics; state decoding.
Figures

References
-
- Achtman N, Afshar A, Santhanam G, Yu BM, Ryu SI, Shenoy KV. Free-paced high-performance brain-computer interfaces. J Neural Eng 4: 336–347, 2007. - PubMed
-
- Aggarwal V, Kerr M, Davidson A, Davoodi R, Loeb G, Schieber MH, Thakor NV. Cortical control of reach and grasp kinematics in a virtual environment using musculoskeletal modeling software. Conf Proc IEEE Eng Med Biol Soc Neur Eng 2011: 388–391, 2011.
-
- Aggarwal V, Singhal G, He J, Schieber MH, Thakor NV. Towards closed-loop decoding of dexterous hand movements using a virtual integration environment. Conf Proc IEEE Eng Med Biol Soc 2008: 1703–1706, 2008b. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Molecular Biology Databases