

Mechanical and energetic consequences of rolling foot shape in human walking
- PMID: 23580717
- PMCID: PMC3694099
- DOI: 10.1242/jeb.082347
Mechanical and energetic consequences of rolling foot shape in human walking
Abstract
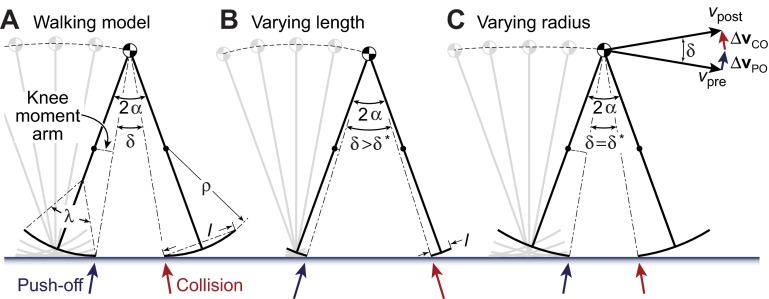
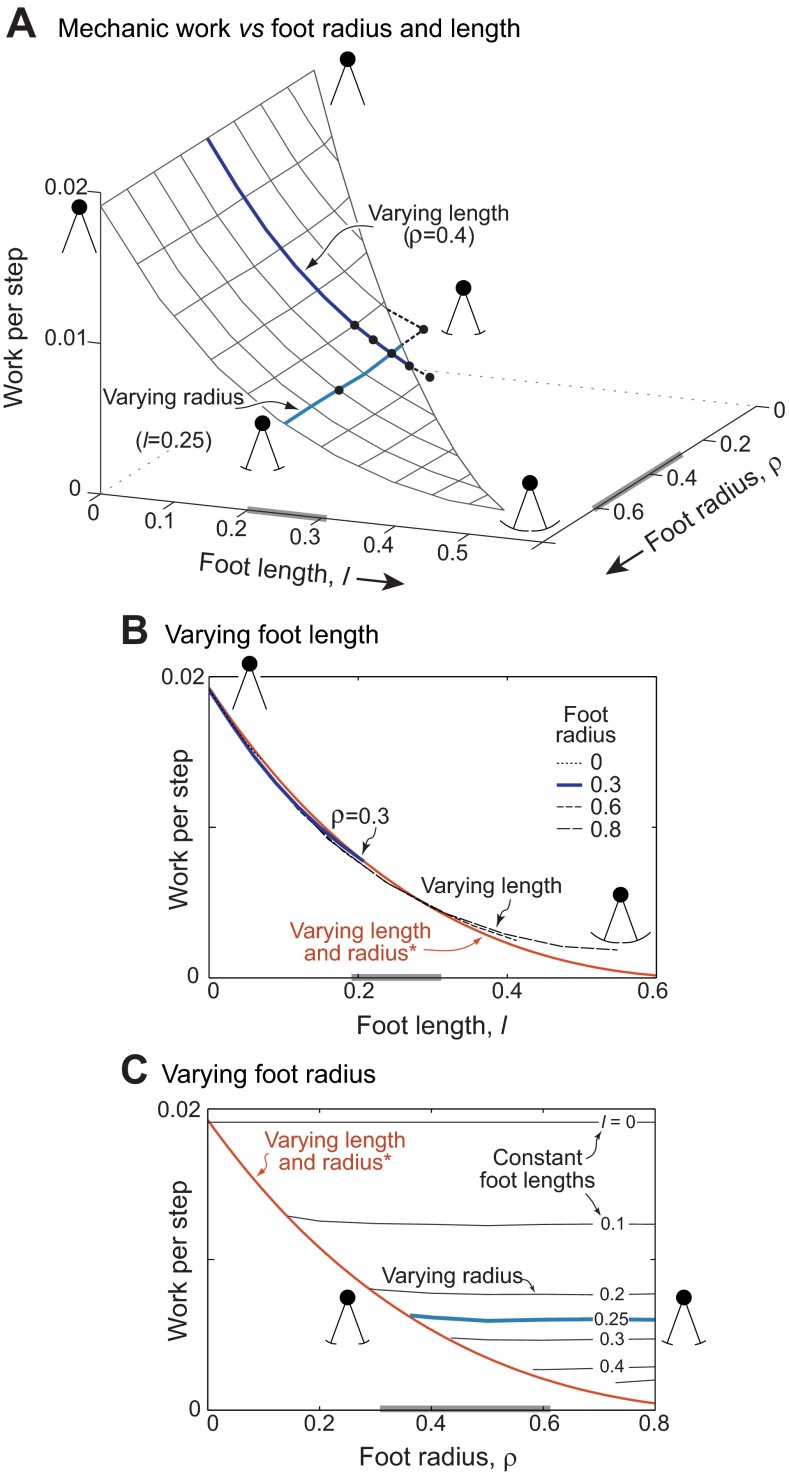
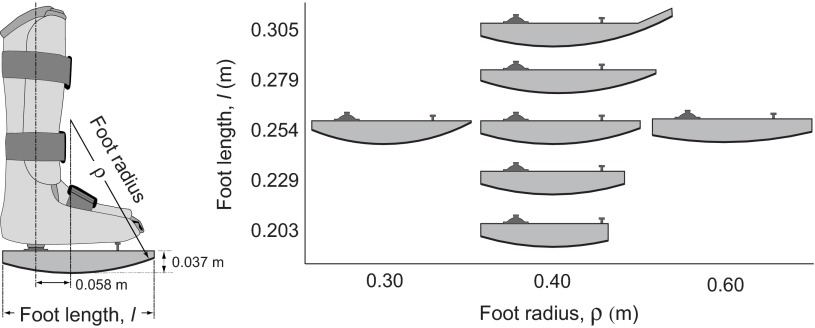
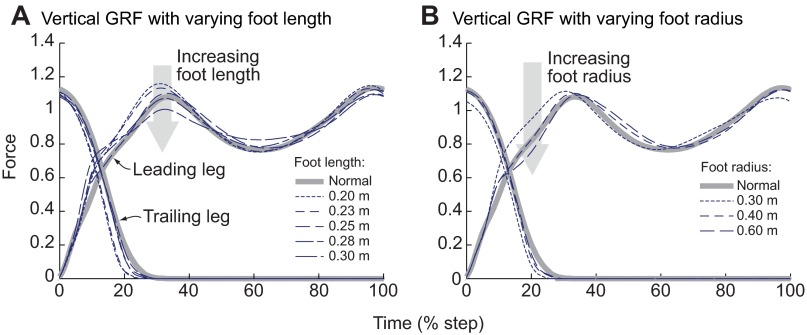
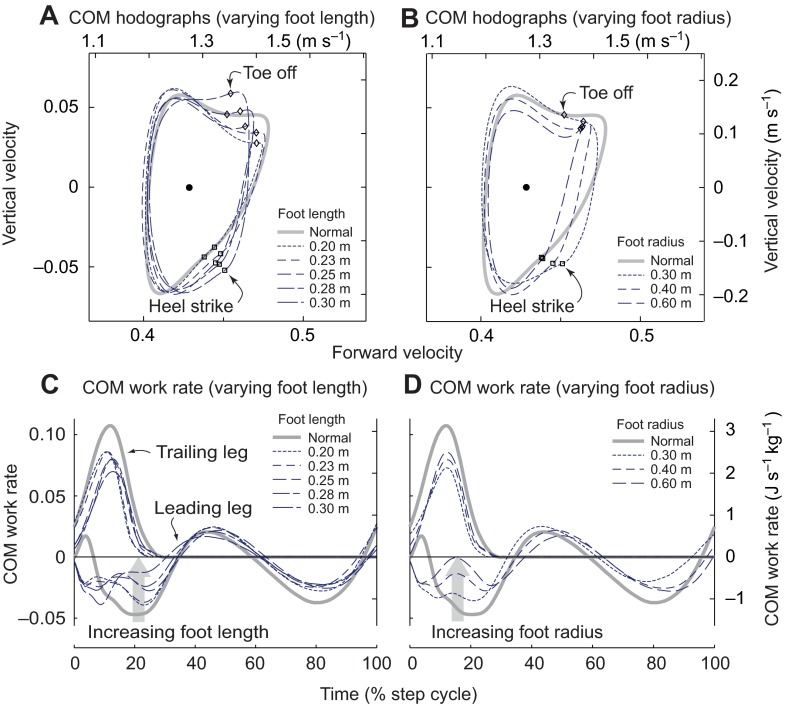
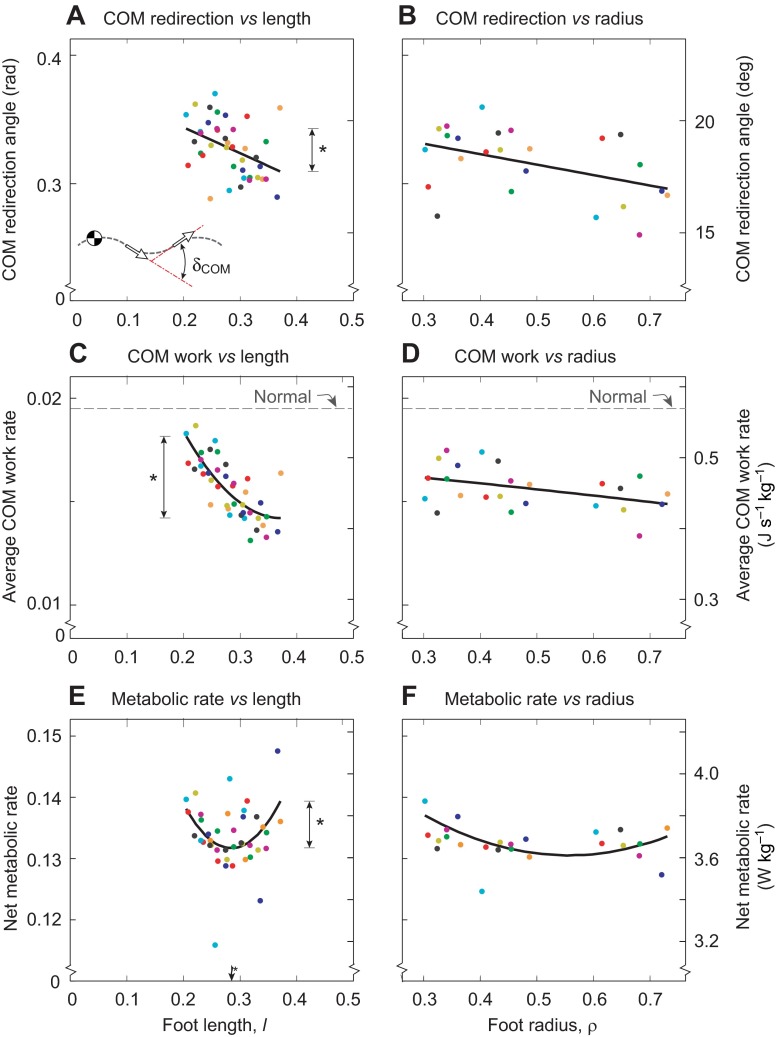
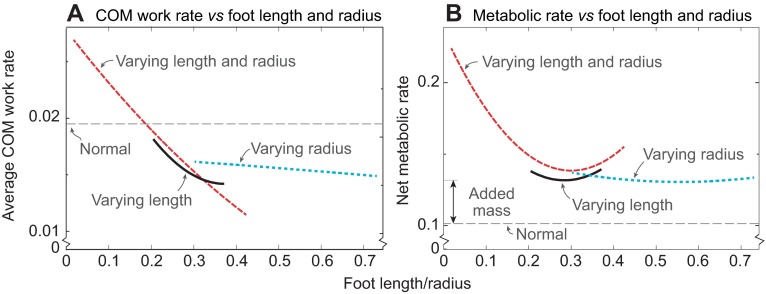
During human walking, the center of pressure under the foot progresses forward smoothly during each step, creating a wheel-like motion between the leg and the ground. This rolling motion might appear to aid walking economy, but the mechanisms that may lead to such a benefit are unclear, as the leg is not literally a wheel. We propose that there is indeed a benefit, but less from rolling than from smoother transitions between pendulum-like stance legs. The velocity of the body center of mass (COM) must be redirected in that transition, and a longer foot reduces the work required for the redirection. Here we develop a dynamic walking model that predicts different effects from altering foot length as opposed to foot radius, and test it by attaching rigid, arc-like foot bottoms to humans walking with fixed ankles. The model suggests that smooth rolling is relatively insensitive to arc radius, whereas work for the step-to-step transition decreases approximately quadratically with foot length. We measured the separate effects of arc-foot length and radius on COM velocity fluctuations, work performed by the legs and metabolic cost. Experimental data (N=8) show that foot length indeed has much greater effect on both the mechanical work of the step-to-step transition (23% variation, P=0.04) and the overall energetic cost of walking (6%, P=0.03) than foot radius (no significant effect, P>0.05). We found the minimum metabolic energy cost for an arc foot length of approximately 29% of leg length, roughly comparable to human foot length. Our results suggest that the foot's apparently wheel-like action derives less benefit from rolling per se than from reduced work to redirect the body COM.
Keywords: arc foot; biomechanics; fixed ankle; foot length; locomotion; metabolic energy; rigid ankle; rocker bottom foot; rollover shape; round foot.
Figures
References
-
- Adamczyk P. G., Collins S. H., Kuo A. D. (2006). The advantages of a rolling foot in human walking. J. Exp. Biol. 209, 3953-3963 - PubMed
-
- Alexander R. M. (1990). Animals. Cambridge: Cambridge University Press;
-
- Brockway J. M. (1987). Derivation of formulae used to calculate energy expenditure in man. Hum. Nutr. Clin. Nutr. 41, 463-471 - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
