

Restoration of upper limb movement via artificial corticospinal and musculospinal connections in a monkey with spinal cord injury
- PMID: 23596396
- PMCID: PMC3622884
- DOI: 10.3389/fncir.2013.00057
Restoration of upper limb movement via artificial corticospinal and musculospinal connections in a monkey with spinal cord injury
Abstract
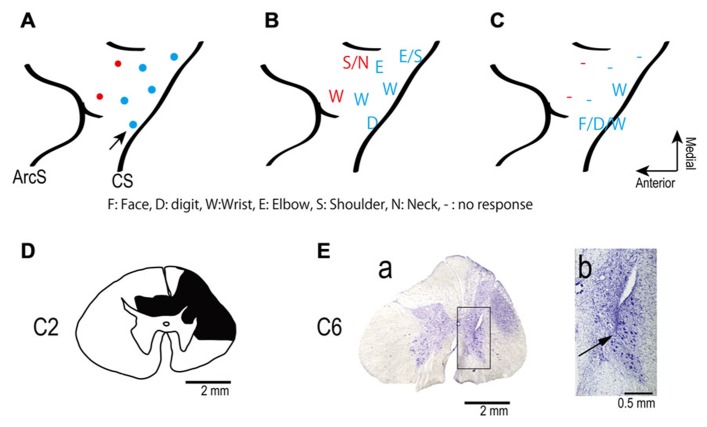
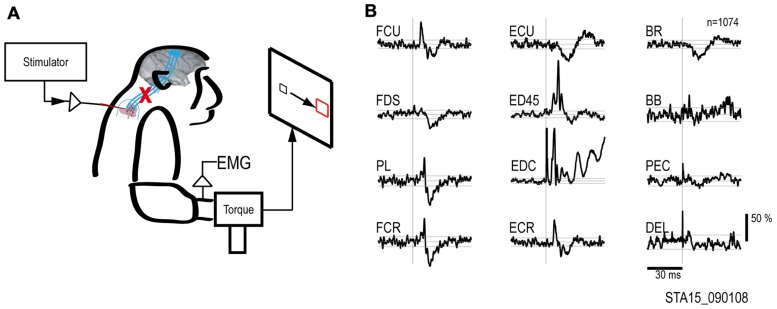
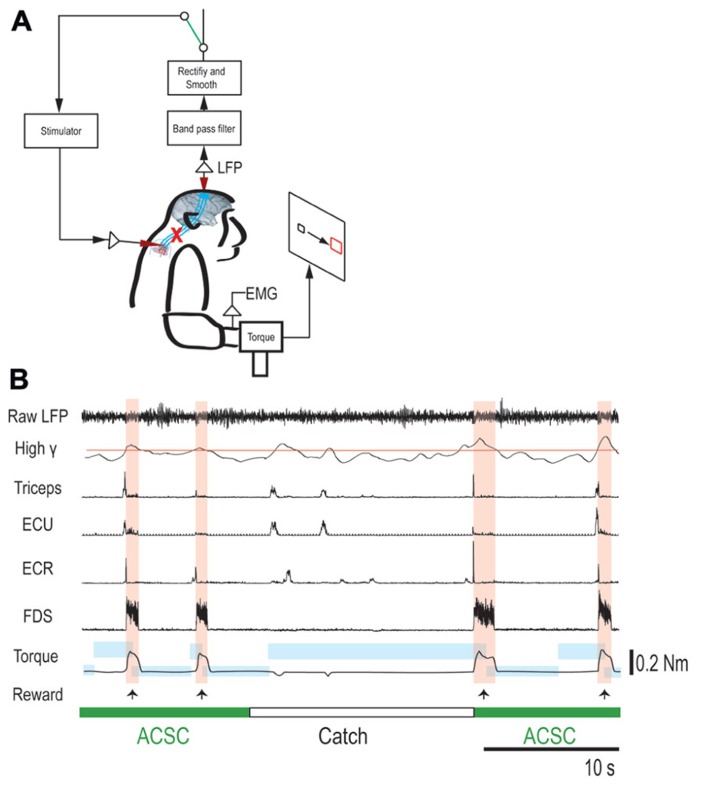
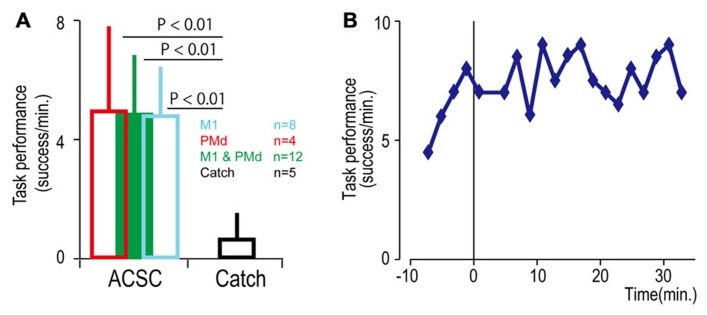
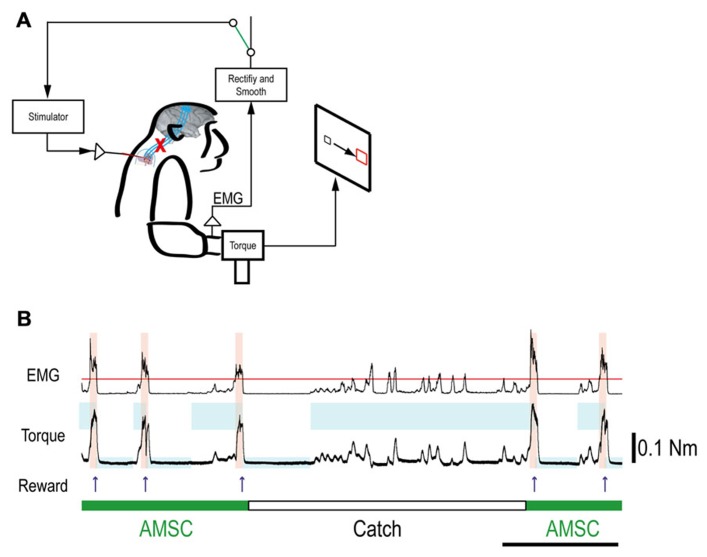
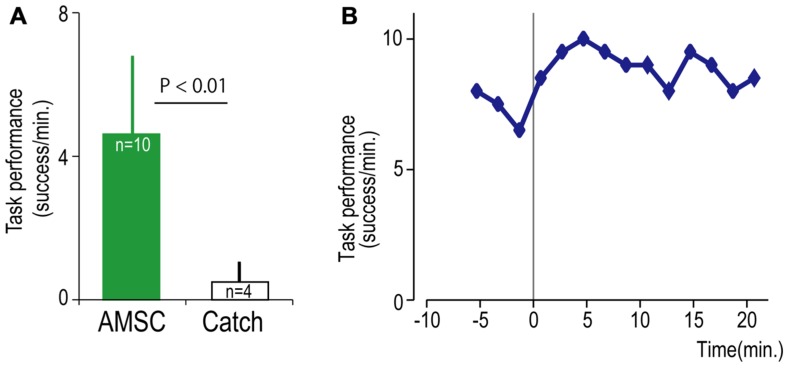
Functional loss of limb control in individuals with spinal cord injury or stroke can be caused by interruption of corticospinal pathways, although the neural circuits located above and below the lesion remain functional. An artificial neural connection that bridges the lost pathway and connects cortical to spinal circuits has potential to ameliorate the functional loss. We investigated the effects of introducing novel artificial neural connections in a paretic monkey that had a unilateral spinal cord lesion at the C2 level. The first application bridged the impaired spinal lesion. This allowed the monkey to drive the spinal stimulation through volitionally controlled power of high-gamma activity in either the premotor or motor cortex, and thereby to acquire a force-matching target. The second application created an artificial recurrent connection from a paretic agonist muscle to a spinal site, allowing muscle-controlled spinal stimulation to boost on-going activity in the muscle. These results suggest that artificial neural connections can compensate for interrupted descending pathways and promote volitional control of upper limb movement after damage of descending pathways such as spinal cord injury or stroke.
Keywords: artificial neural connection; brain–computer interface; hand; local field potential; monkey; muscle; spinal cord; spinal cord injury.
Figures
References
-
- Alstermark B., Pettersson L. G., Nishimura Y., Yoshino-Saito K., Tsuboi F., Takahashi M., et al. (2011). Motor command for precision grip in the macaque monkey can be mediated by spinal interneurons. J. Neurophysiol. 106 122–126 - PubMed
-
- Chiken S., Hatanaka N., Tokuno H. (2001). Distribution of median, ulnar and radial motoneurons in the monkey spinal cord: a retrograde triple-labeling study. Neurosci. Lett. 307 143–146 - PubMed
-
- Choi K., Hirose H., Sakurai Y., Iijima T., Koike Y. (2009). Prediction of arm trajectory from the neural activities of the primary motor cortex with modular connectionist architecture. Neural Netw. 22 1214–1223 - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
Miscellaneous