

Adaptation and generalization to opposing perturbations in walking
- PMID: 23603517
- PMCID: PMC3809766
- DOI: 10.1016/j.neuroscience.2013.04.013
Adaptation and generalization to opposing perturbations in walking
Abstract
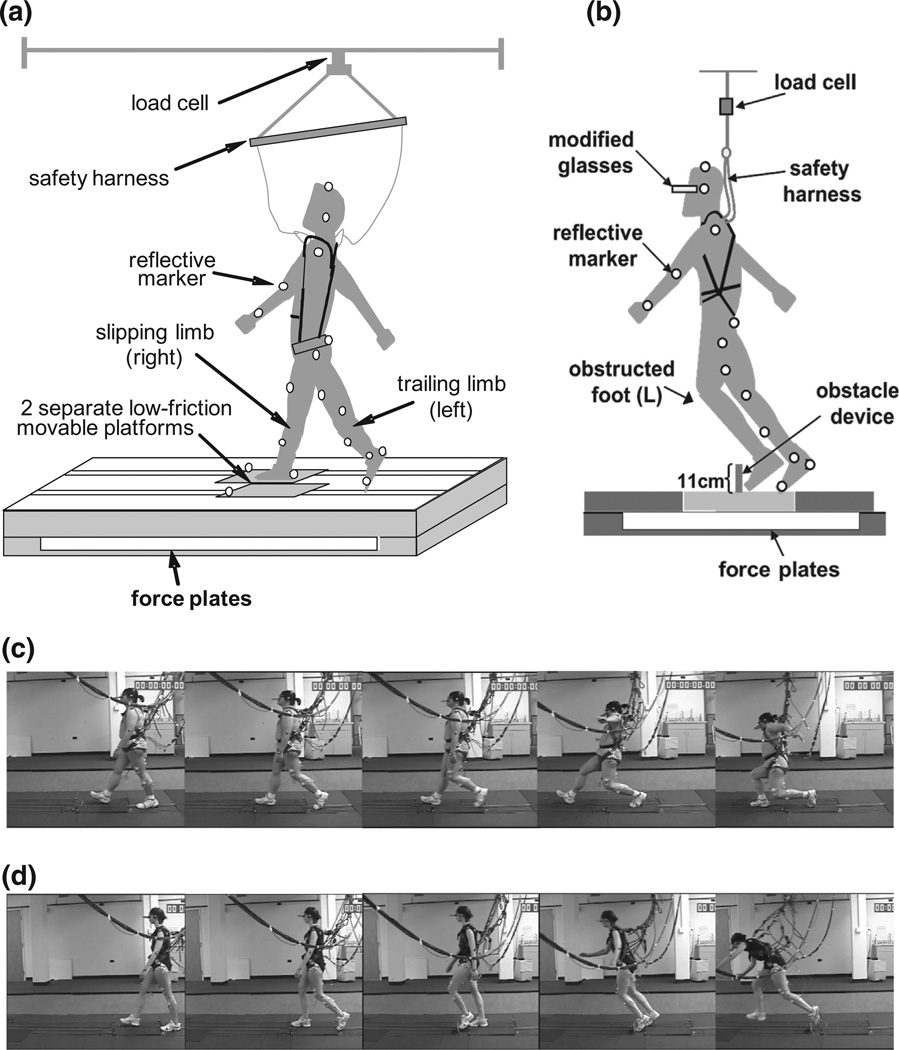
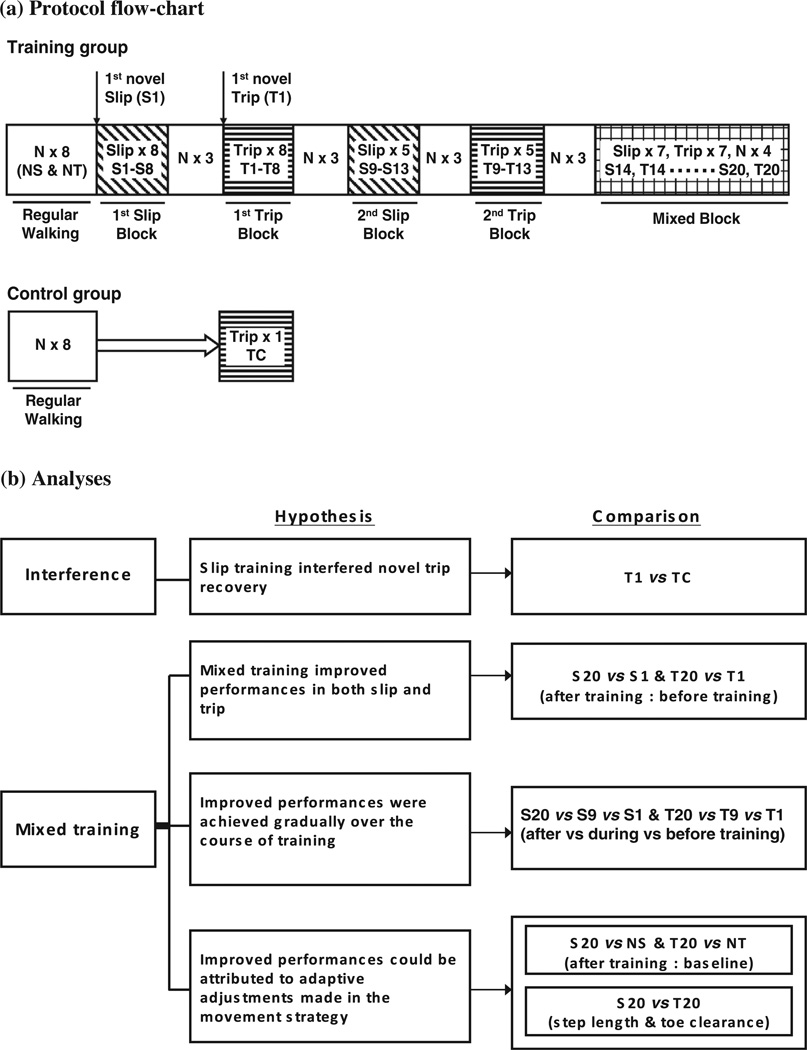
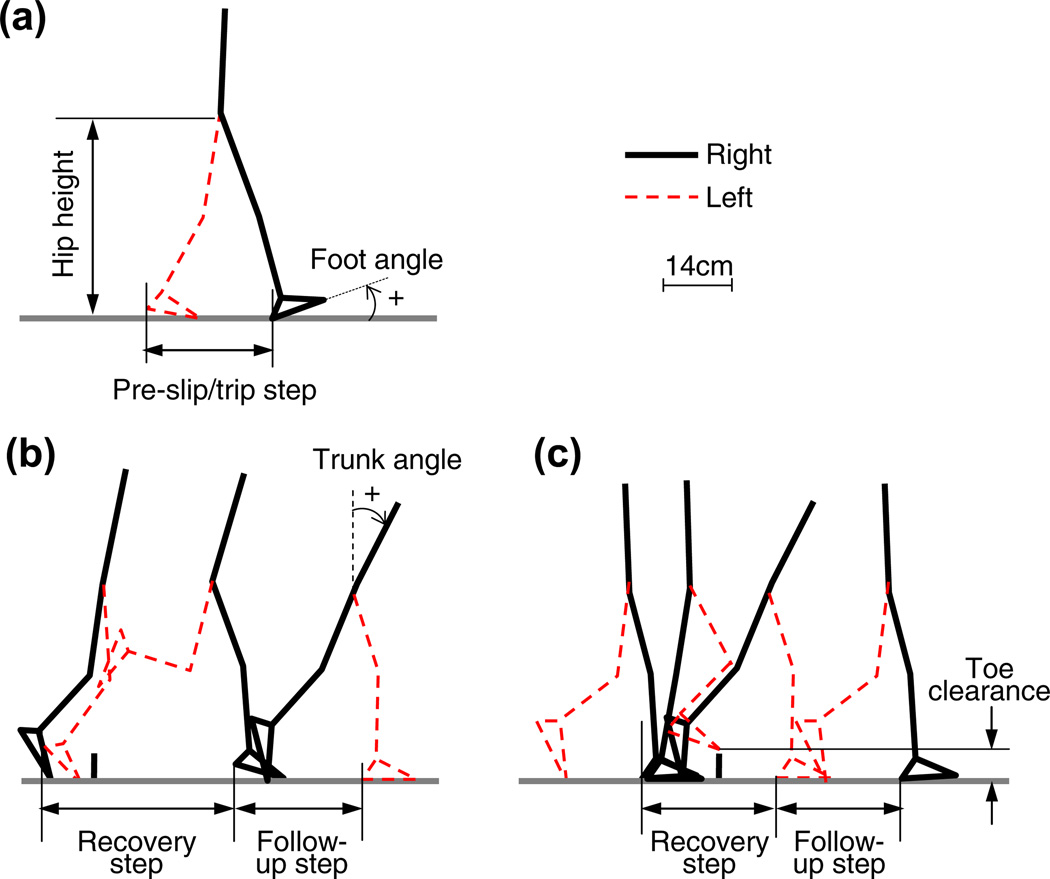
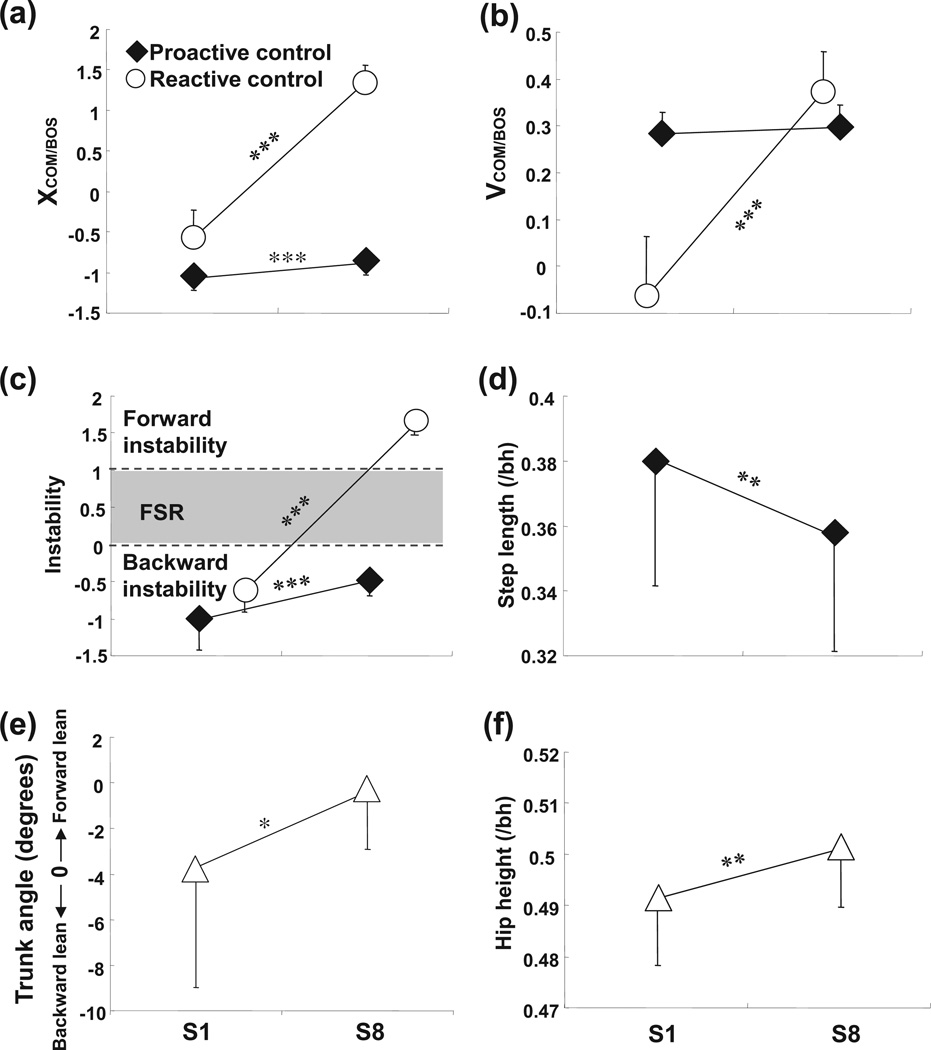
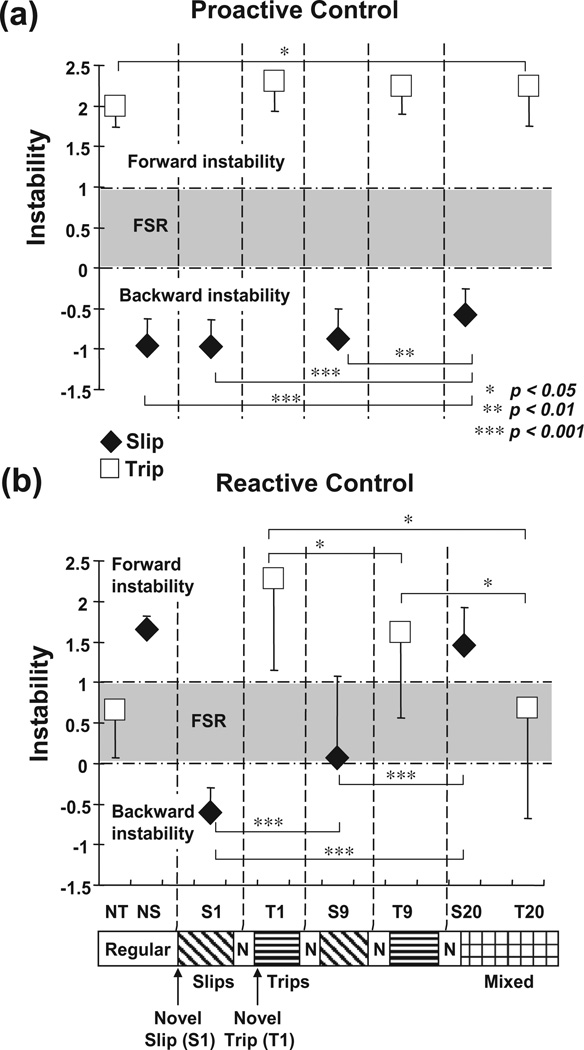
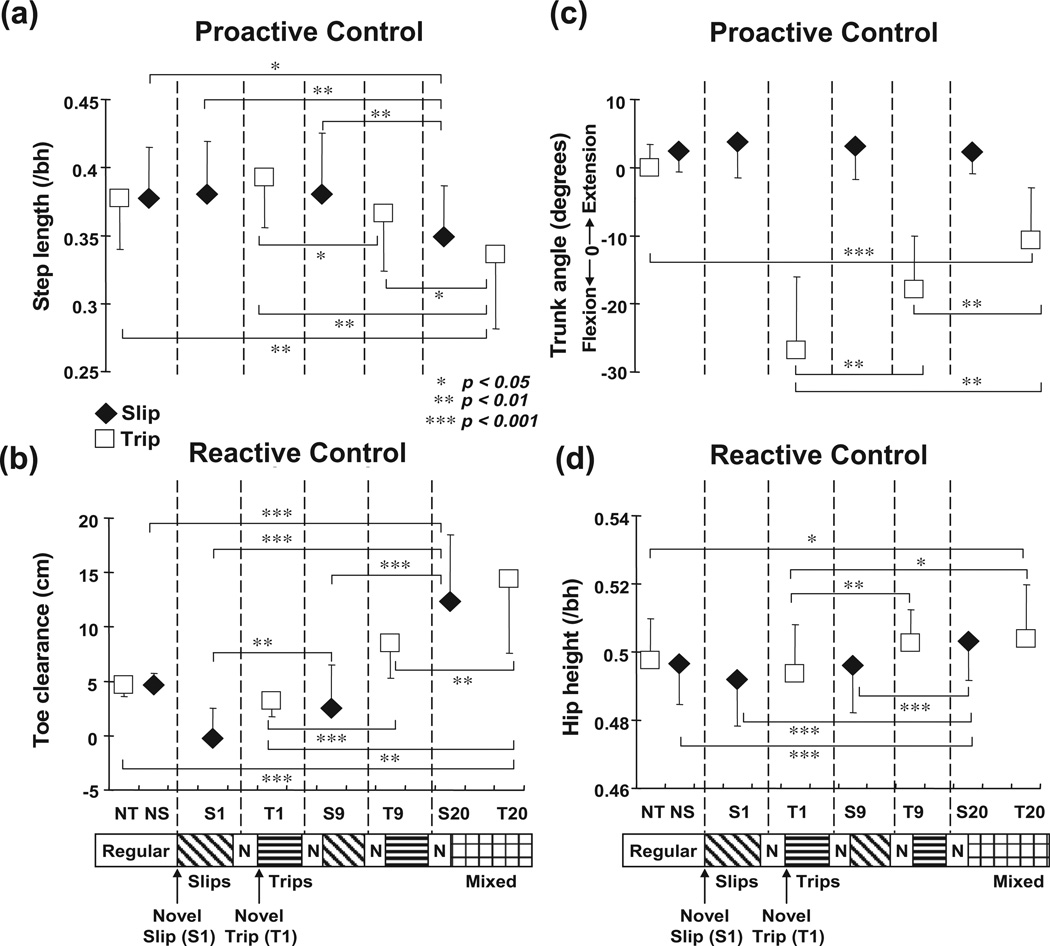
Little is known on how the CNS would select its movement options when a person faces a novel or recurring perturbation of two opposing types (slip or trip) while walking. The purposes of this study were (1) to determine whether young adults' adaptation to repeated slips would interfere with their recovery from a novel trip, and (2) to investigate the generalized strategies after they were exposed to a mixed training with both types of perturbation. Thirty-two young adults were assigned to either the training group, which first underwent repeated-slip training before encountering a novel, unannounced trip while walking, or to the control group, which only experienced the same novel, unannounced trip. The former group would then experience a mix of repeated trips and slips. The results indicated that prior adaptation to slips had only limited interference during the initial phase of trip recovery. In fact, the prior repeated-slip exposure had primed their reaction, which mitigated any error resulting from early interference. As a result, they did not have to take a longer compensatory step for trip recovery than did the controls. After the mixed training, subjects were able to converge effectively the motion state of their center of mass (in its position and velocity space) to a stable and generalized "middle ground" steady-state. Such movement strategies not only further strengthened their robust reactive control of stability, but also reduced the CNS' overall reliance on accurate context prediction and on feedback correction of perturbation-induced movement error.
Copyright © 2013. Published by Elsevier Ltd.
Conflict of interest statement
None.
Figures

References
-
- Bhatt T, Wening JD, Pai Y-C. Influence of gait speed on stability: recover from anterior slips and compensatory stepping. Gait Posture. 2005;21:146–156. - PubMed
-
- Bhatt T, Wening JD, Pai YC. Adaptive control of gait stability in reducing slip-related backward loss of balance. Exp Brain Res. 2006a;170:61–73. - PubMed
-
- Bhatt T, Wang E, Pai YC. Retention of adaptive control over varying intervals: prevention of slip-induced backward balance loss during gait. J Neurophysiol. 2006b;95:2913–2922. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Research Materials
