

Muscle synergies in neuroscience and robotics: from input-space to task-space perspectives
- PMID: 23626535
- PMCID: PMC3630334
- DOI: 10.3389/fncom.2013.00043
Muscle synergies in neuroscience and robotics: from input-space to task-space perspectives
Abstract
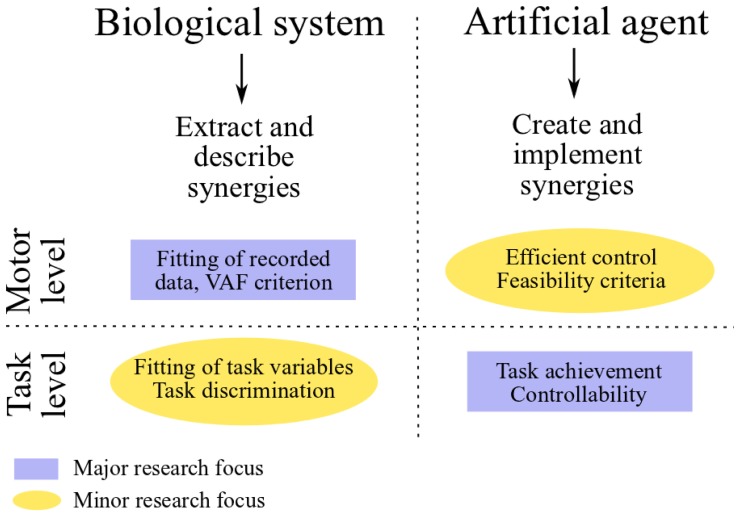
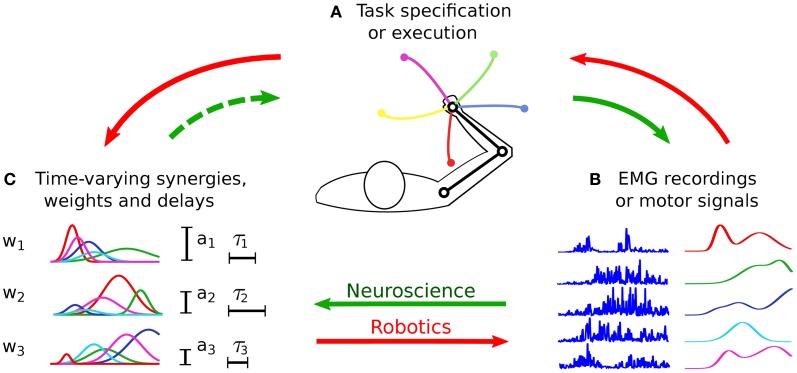
In this paper we review the works related to muscle synergies that have been carried-out in neuroscience and control engineering. In particular, we refer to the hypothesis that the central nervous system (CNS) generates desired muscle contractions by combining a small number of predefined modules, called muscle synergies. We provide an overview of the methods that have been employed to test the validity of this scheme, and we show how the concept of muscle synergy has been generalized for the control of artificial agents. The comparison between these two lines of research, in particular their different goals and approaches, is instrumental to explain the computational implications of the hypothesized modular organization. Moreover, it clarifies the importance of assessing the functional role of muscle synergies: although these basic modules are defined at the level of muscle activations (input-space), they should result in the effective accomplishment of the desired task. This requirement is not always explicitly considered in experimental neuroscience, as muscle synergies are often estimated solely by analyzing recorded muscle activities. We suggest that synergy extraction methods should explicitly take into account task execution variables, thus moving from a perspective purely based on input-space to one grounded on task-space as well.
Keywords: dimensionality reduction; modularity; motor control; muscle synergies; review; robotics; task-space.
Figures

Similar articles
-
Do muscle synergies reduce the dimensionality of behavior?Front Comput Neurosci. 2014 Jun 23;8:63. doi: 10.3389/fncom.2014.00063. eCollection 2014. Front Comput Neurosci. 2014. PMID: 25002844 Free PMC article.
-
A methodology for assessing the effect of correlations among muscle synergy activations on task-discriminating information.Front Comput Neurosci. 2013 May 13;7:54. doi: 10.3389/fncom.2013.00054. eCollection 2013. Front Comput Neurosci. 2013. PMID: 23717277 Free PMC article.
-
Task-discriminative space-by-time factorization of muscle activity.Front Hum Neurosci. 2015 Jul 10;9:399. doi: 10.3389/fnhum.2015.00399. eCollection 2015. Front Hum Neurosci. 2015. PMID: 26217213 Free PMC article.
-
A Systematic Review on Muscle Synergies: From Building Blocks of Motor Behavior to a Neurorehabilitation Tool.Appl Bionics Biomech. 2018 Apr 22;2018:3615368. doi: 10.1155/2018/3615368. eCollection 2018. Appl Bionics Biomech. 2018. PMID: 29849756 Free PMC article. Review.
-
Feasibility of Muscle Synergy Outcomes in Clinics, Robotics, and Sports: A Systematic Review.Appl Bionics Biomech. 2018 Apr 1;2018:3934698. doi: 10.1155/2018/3934698. eCollection 2018. Appl Bionics Biomech. 2018. PMID: 29808098 Free PMC article. Review.
Cited by
-
Dissecting muscle synergies in the task space.Elife. 2024 Feb 26;12:RP87651. doi: 10.7554/eLife.87651. Elife. 2024. PMID: 38407224 Free PMC article.
-
Low-Dimensional Motor Control Representations in Throwing Motions.Appl Bionics Biomech. 2017;2017:3050917. doi: 10.1155/2017/3050917. Epub 2017 Dec 31. Appl Bionics Biomech. 2017. PMID: 29463956 Free PMC article.
-
Adaptation of muscle activation after patellar loading demonstrates neural control of joint variables.Sci Rep. 2019 Dec 30;9(1):20370. doi: 10.1038/s41598-019-56888-9. Sci Rep. 2019. PMID: 31889142 Free PMC article.
-
On identifying kinematic and muscle synergies: a comparison of matrix factorization methods using experimental data from the healthy population.J Neurophysiol. 2017 Jan 1;117(1):290-302. doi: 10.1152/jn.00435.2016. Epub 2016 Nov 16. J Neurophysiol. 2017. PMID: 27852733 Free PMC article.
-
The central nervous system adjusts muscle synergy structure and tightly controls rollator-supported transitions between sitting and standing.J Neuroeng Rehabil. 2025 Apr 25;22(1):96. doi: 10.1186/s12984-025-01622-y. J Neuroeng Rehabil. 2025. PMID: 40281643 Free PMC article.
References
-
- Alessandro C., Carbajal J. P., d'Avella A. (2012). Synthesis and adaptation of effective motor synergies for the solution of reaching tasks, in Lecture Notes in Artificial Intelligence (LNAI), eds Ziemke T., Balkenius C., Hallam J. (Berlin: Springer-Verlag; ), 33–43
-
- Alessandro C., Nori F. (2012). Identification of synergies by optimization of trajectory tracking tasks, in IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics (Rome: IEEE; ), 924–930
-
- Bell A. J., Sejnowski T. J. (1995). An information-maximization approach to blind separation and blind deconvolution. Neural Comput. 7, 1129–1159 - PubMed
-
- Berniker M. (2005). Linearity, Motor Primitives and Low-Dimensionality in the Spinal Organization of Motor Control. Ph.D. thesis, Massachusetts Institute of Technology.
LinkOut - more resources
Full Text Sources
Other Literature Sources