

ESPIRiT--an eigenvalue approach to autocalibrating parallel MRI: where SENSE meets GRAPPA
- PMID: 23649942
- PMCID: PMC4142121
- DOI: 10.1002/mrm.24751
ESPIRiT--an eigenvalue approach to autocalibrating parallel MRI: where SENSE meets GRAPPA
Abstract
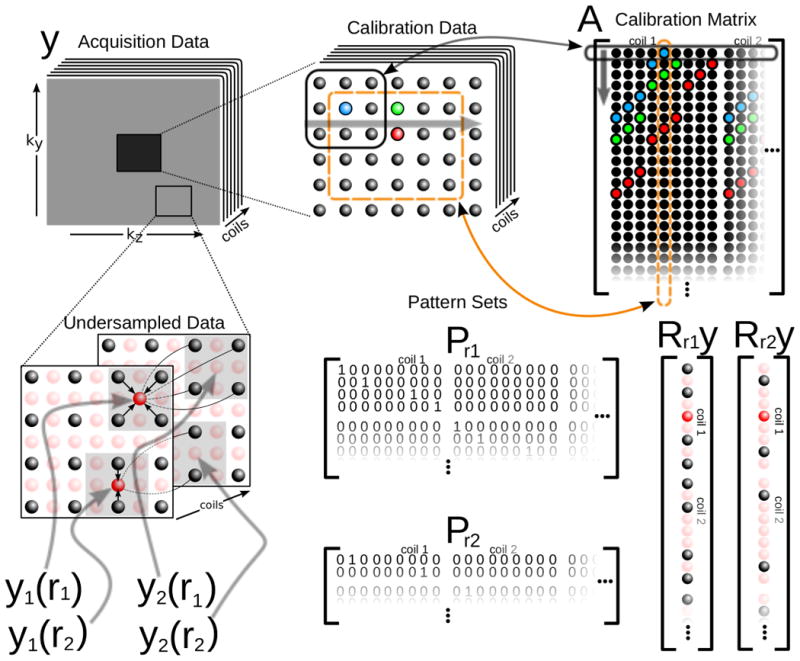
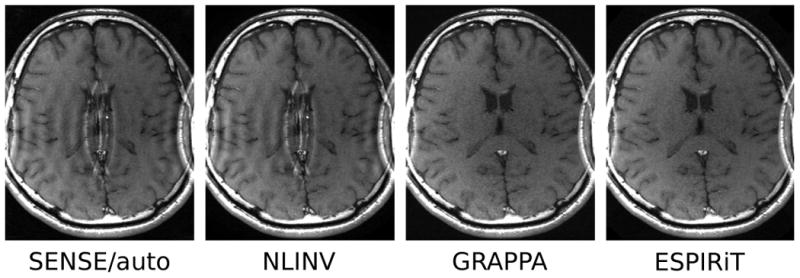
Purpose: Parallel imaging allows the reconstruction of images from undersampled multicoil data. The two main approaches are: SENSE, which explicitly uses coil sensitivities, and GRAPPA, which makes use of learned correlations in k-space. The purpose of this work is to clarify their relationship and to develop and evaluate an improved algorithm.
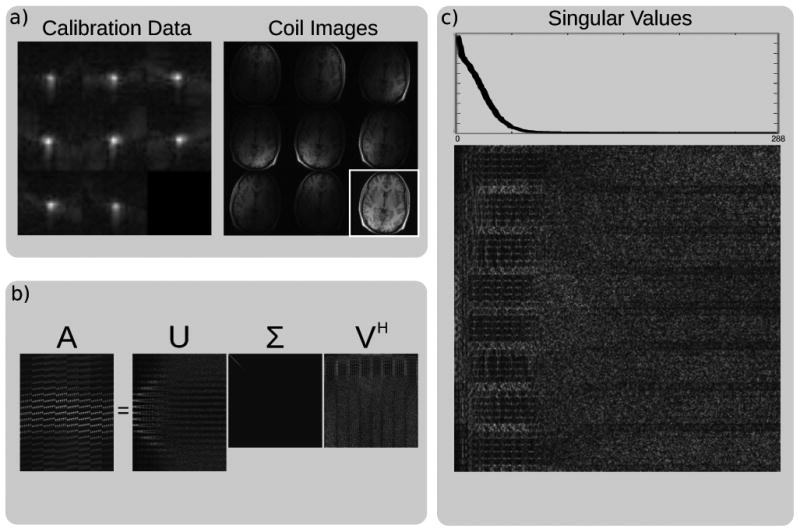
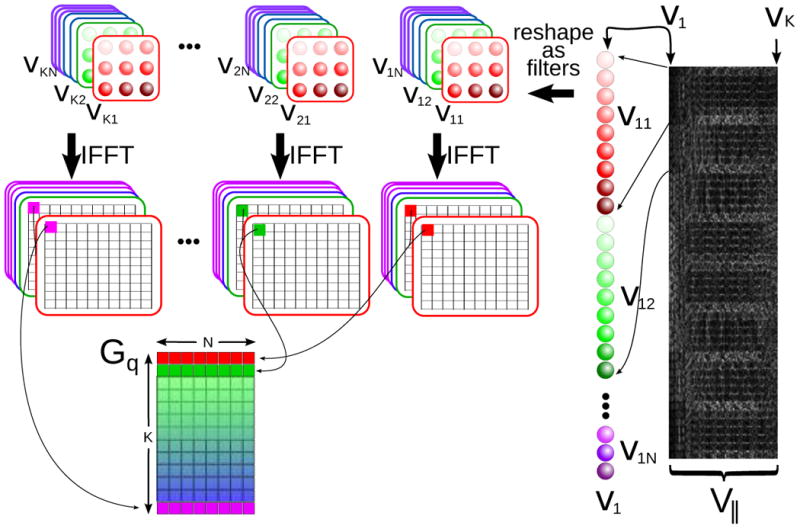
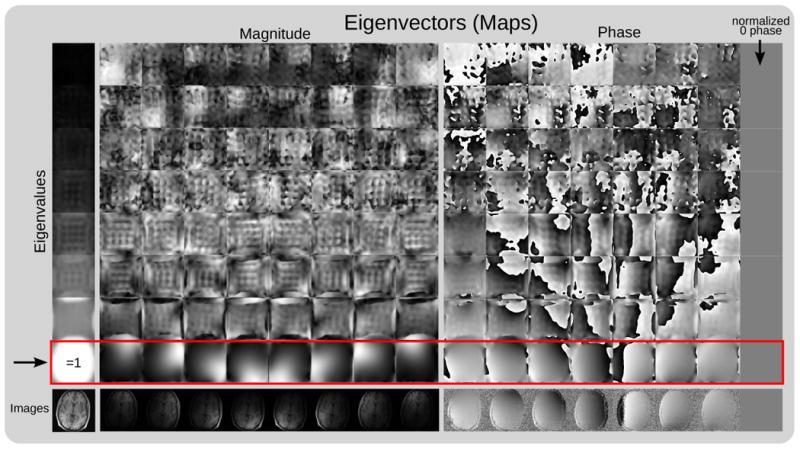
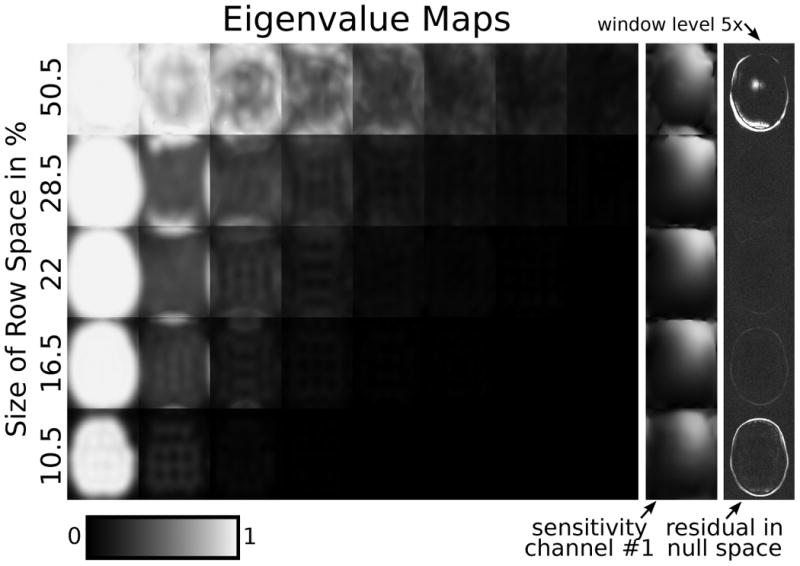
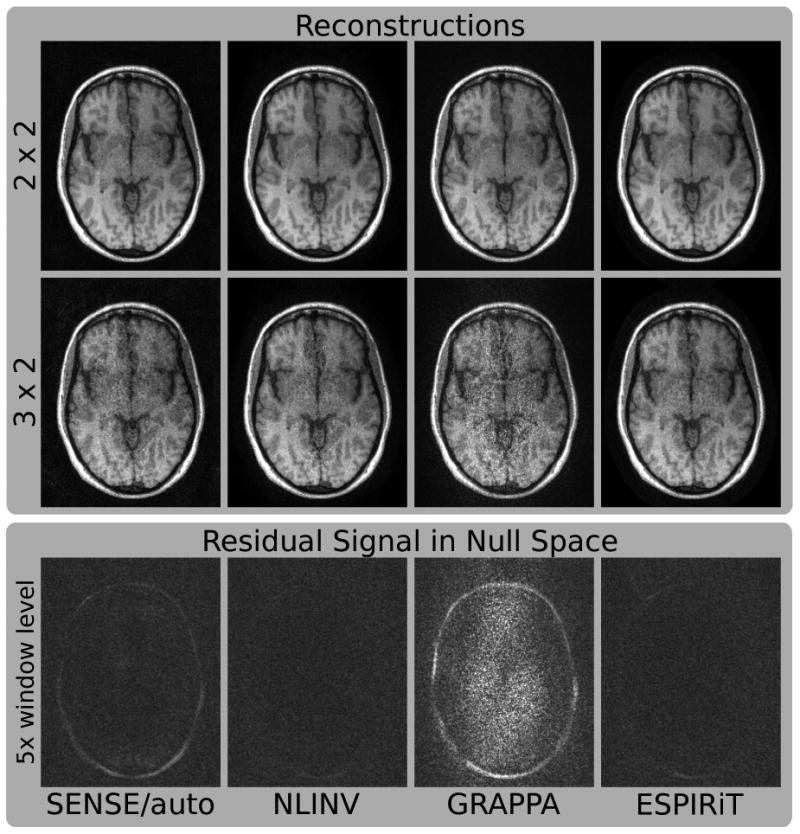
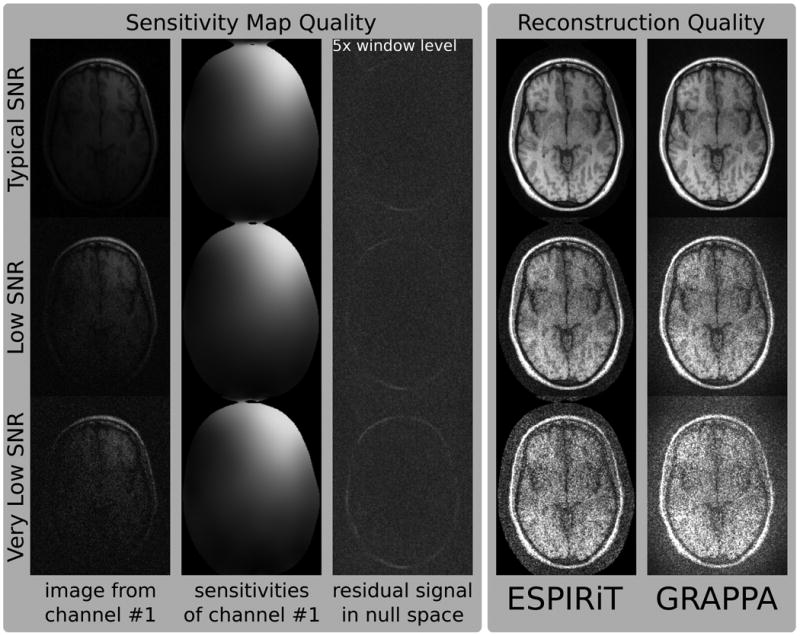
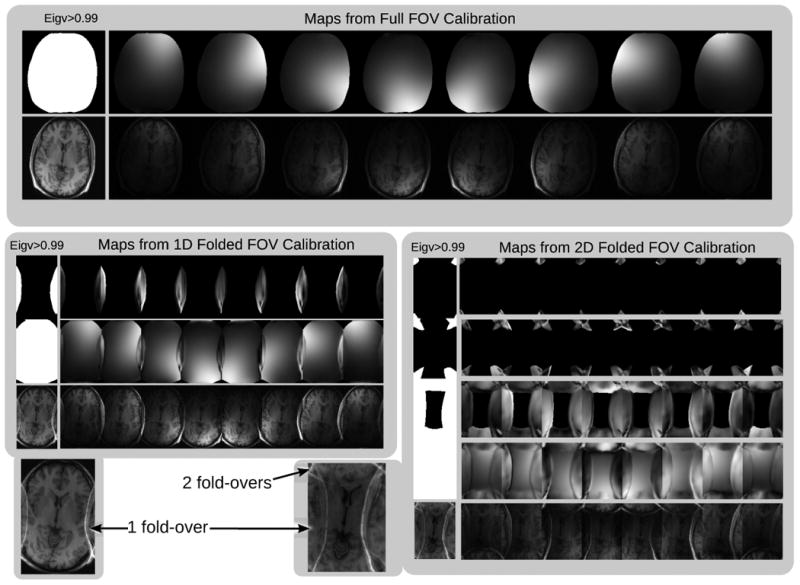
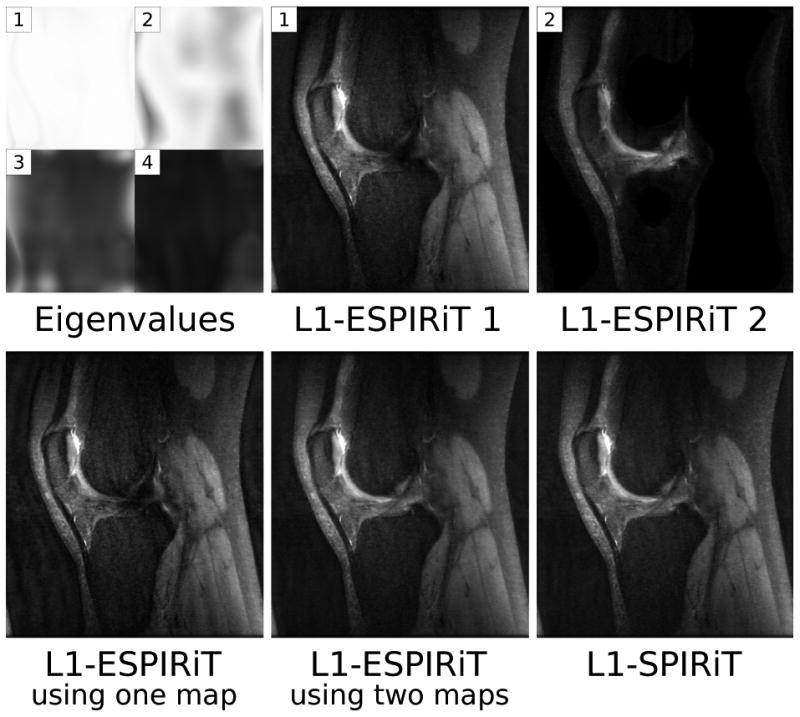
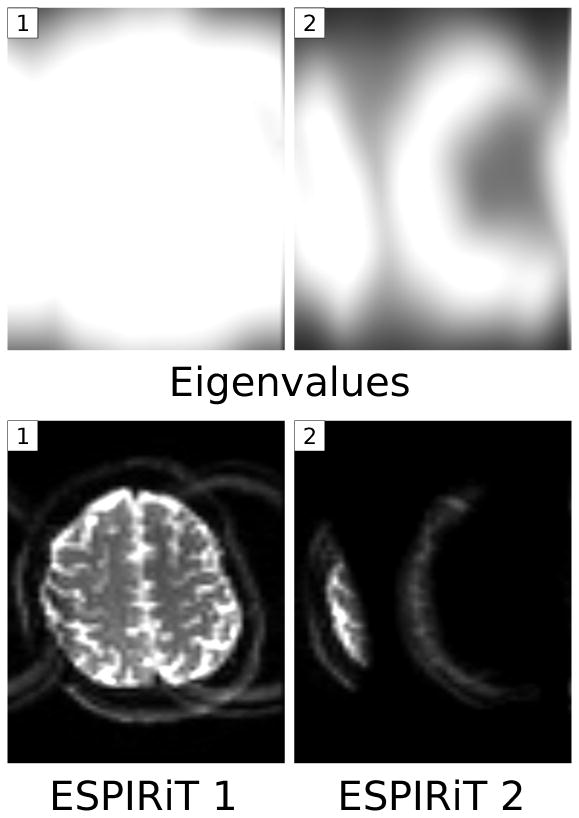
Theory and methods: A theoretical analysis shows: (1) The correlations in k-space are encoded in the null space of a calibration matrix. (2) Both approaches restrict the solution to a subspace spanned by the sensitivities. (3) The sensitivities appear as the main eigenvector of a reconstruction operator computed from the null space. The basic assumptions and the quality of the sensitivity maps are evaluated in experimental examples. The appearance of additional eigenvectors motivates an extended SENSE reconstruction with multiple maps, which is compared to existing methods.
Results: The existence of a null space and the high quality of the extracted sensitivities are confirmed. The extended reconstruction combines all advantages of SENSE with robustness to certain errors similar to GRAPPA.
Conclusion: In this article the gap between both approaches is finally bridged. A new autocalibration technique combines the benefits of both.
Copyright © 2013 Wiley Periodicals, Inc.
Figures
References
-
- Ra JB, Rim CY. Fast imaging using subencoding data sets from multiple detectors. Magn Reson Med. 1993;30:142–145. - PubMed
-
- Pruessmann KP, Weiger M, Scheidegger MB, Boesiger P. SENSE: Sensitivity encoding for fast MRI. Magn Reson Med. 1999;42:952–962. - PubMed
-
- Griswold MA, Jakob PM, Heidemann RM, Nittka M, Jellus V, Wang J, Kiefer B, Haase A. Generalized autocalibrating partially parallel acquisitions (GRAPPA) Magn Reson Med. 2002;47:1202–1210. - PubMed
-
- Pruessmann KP, Weiger M, Börnert P, Boesiger P. Advances in sensitivity encoding with arbitrary k-space trajectories. Magn Reson Med. 2001;46:638–651. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
Miscellaneous
