

Robot-assisted intraocular surgery: development of the IRISS and feasibility studies in an animal model
- PMID: 23722720
- PMCID: PMC3740307
- DOI: 10.1038/eye.2013.105
Robot-assisted intraocular surgery: development of the IRISS and feasibility studies in an animal model
Abstract
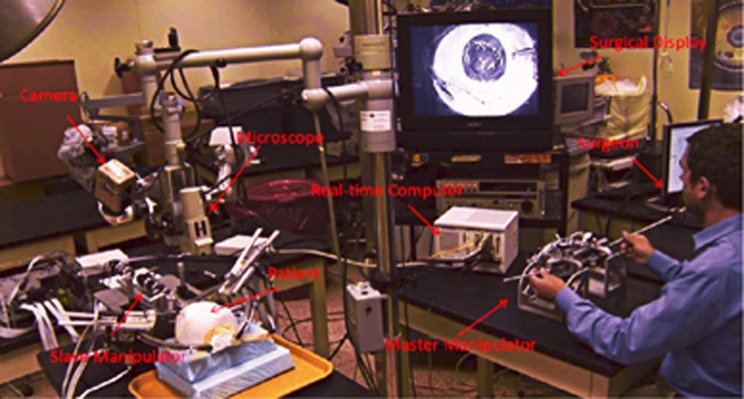
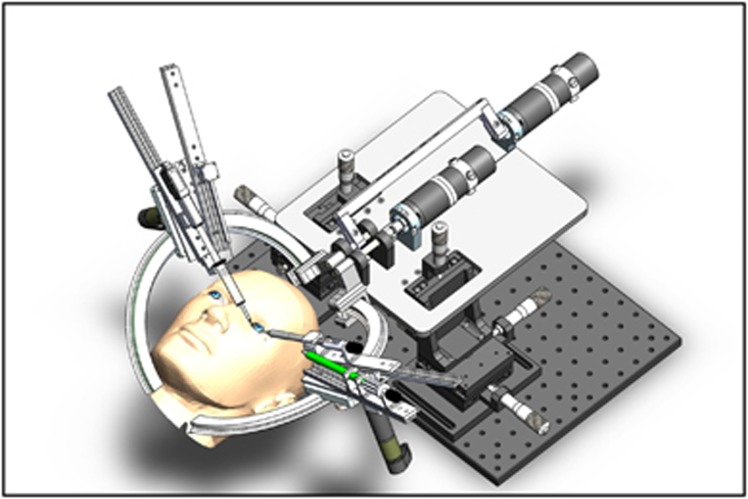
Purpose: The aim of this study is to develop a novel robotic surgical platform, the IRISS (Intraocular Robotic Interventional and Surgical System), capable of performing both anterior and posterior segment intraocular surgery, and assess its performance in terms of range of motion, speed of motion, accuracy, and overall capacities.
Patients and methods: To test the feasibility of performing 'bimanual' intraocular surgical tasks using the IRISS, we defined four steps out of typical anterior (phacoemulsification) and posterior (pars plana vitrectomy (PPV)) segment surgery. Selected phacoemulsification steps included construction of a continuous curvilinear capsulorhexis and cortex removal in infusion-aspiration (I/A) mode. Vitrectomy steps consisted of performing a core PPV, followed by aspiration of the posterior hyaloid with the vitreous cutter to induce a posterior vitreous detachment (PVD) assisted with triamcinolone, and simulation of the microcannulation of a temporal retinal vein. For each evaluation, the duration and the successful completion of the task with or without complications or involuntary events was assessed.
Results: Intraocular procedures were successfully performed on 16 porcine eyes. Four eyes underwent creation of a round, curvilinear anterior capsulorhexis without radialization. Four eyes had I/A of lens cortical material completed without posterior capsular tear. Four eyes completed 23-gauge PPV followed by successful PVD induction without any complications. Finally, simulation of microcannulation of a temporal retinal vein was successfully achieved in four eyes without any retinal tears/perforations noted.
Conclusion: Robotic-assisted intraocular surgery with the IRISS may be technically feasible in humans. Further studies are pending to improve this particular surgical platform.
Figures
References
-
- Ruurda JP, Broeders IA, Simmermacher RP, Borel Rinkes IH, Van Vroonhoven TJ. Feasibility of robot-assisted laparoscopic surgery: an evaluation of 35 robot-assisted laparoscopic cholecystectomies. Surg Laparosc Endosc Percutan Tech. 2002;12:41–45. - PubMed
-
- Dasgupta P, Challacombe B, Murphy D, Khan MS. Coming full circle in robotic urology. BJU Int. 2006;98:4–5. - PubMed
-
- Kaul S, Laungani R, Sarle R, Stricker H, Peabody J, Littleton R, et al. da Vinci-assisted robotic partial nephrectomy: technique and results at a mean of 15 months of follow-up Eur Urol 200751186–191.discussion 191–182. - PubMed
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Miscellaneous
