

Stability radius as a method for comparing the dynamics of neuromechanical systems
- PMID: 23744699
- PMCID: PMC4387576
- DOI: 10.1109/TNSRE.2013.2264920
Stability radius as a method for comparing the dynamics of neuromechanical systems
Abstract
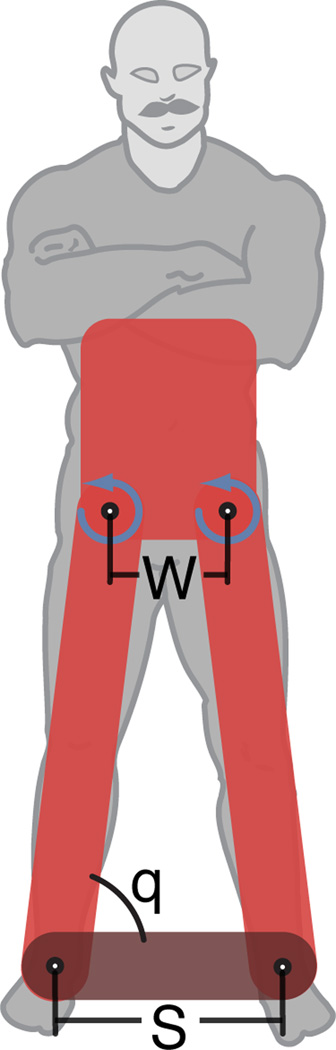
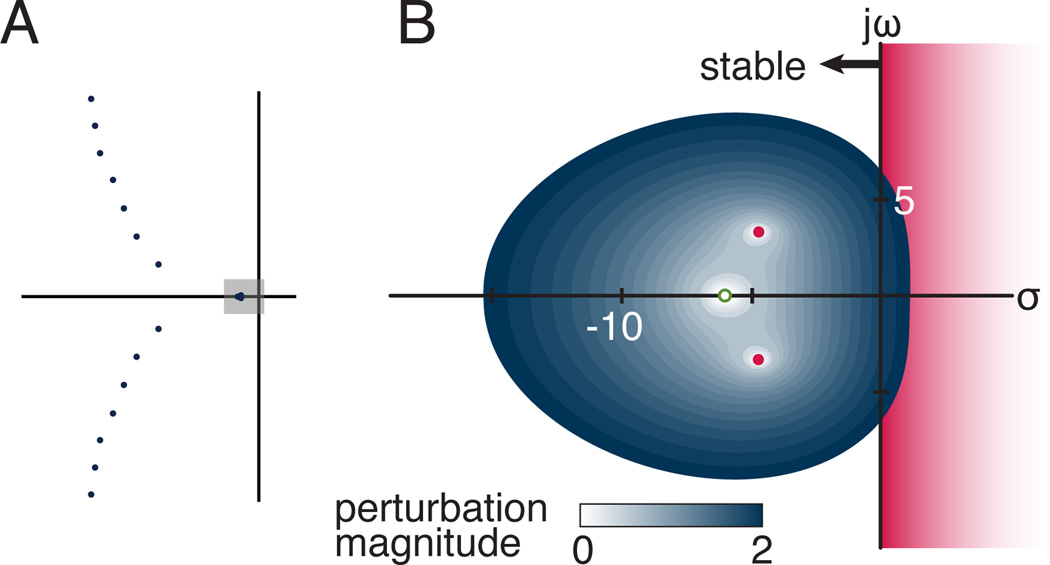
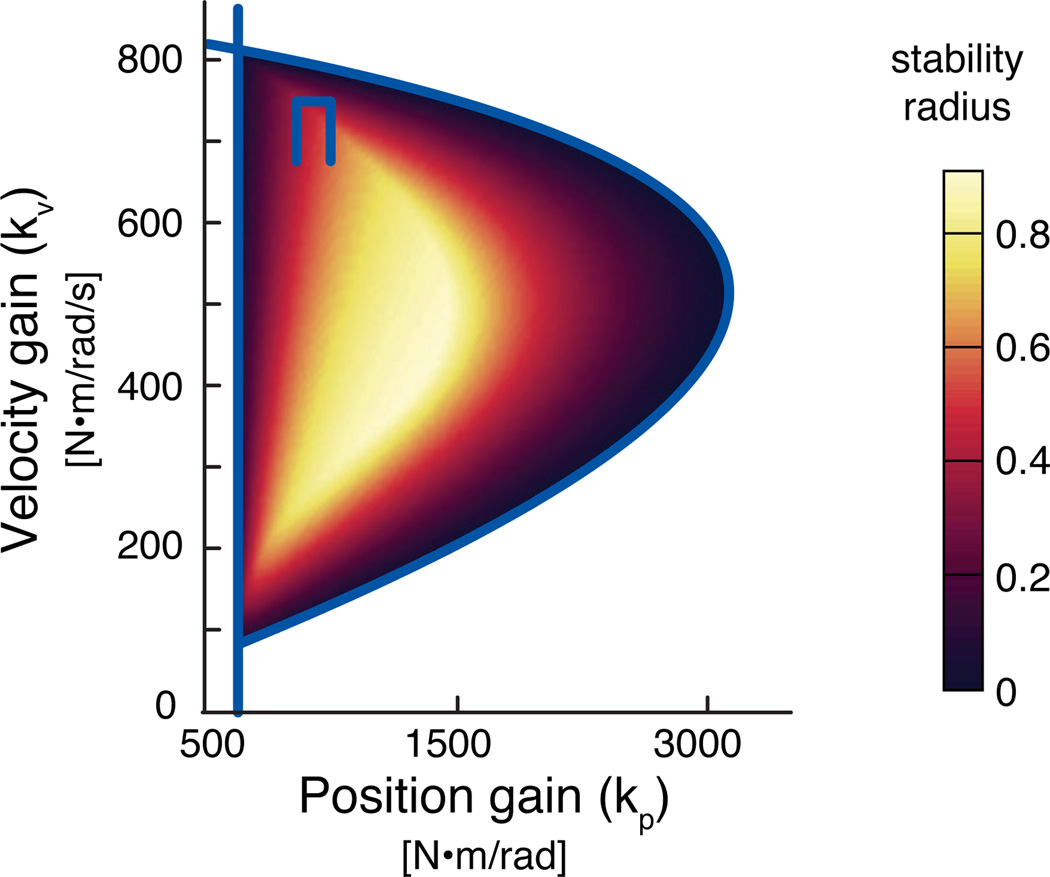
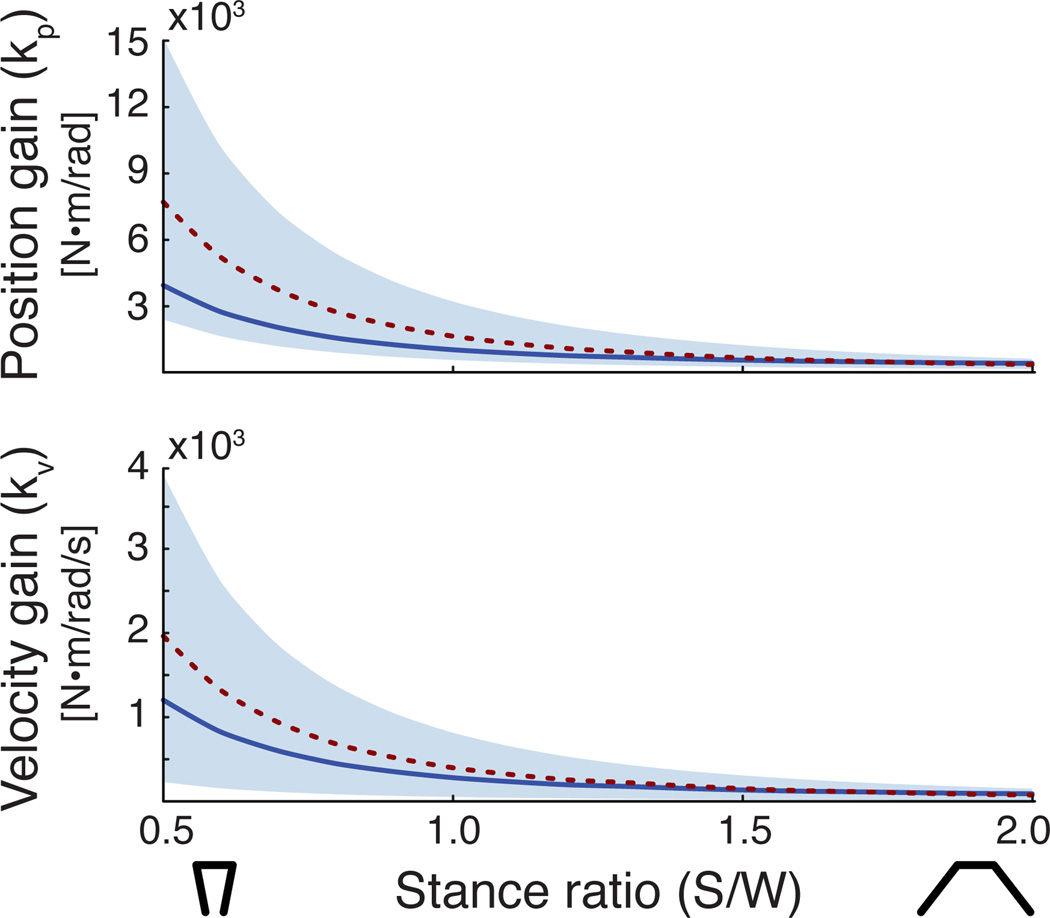
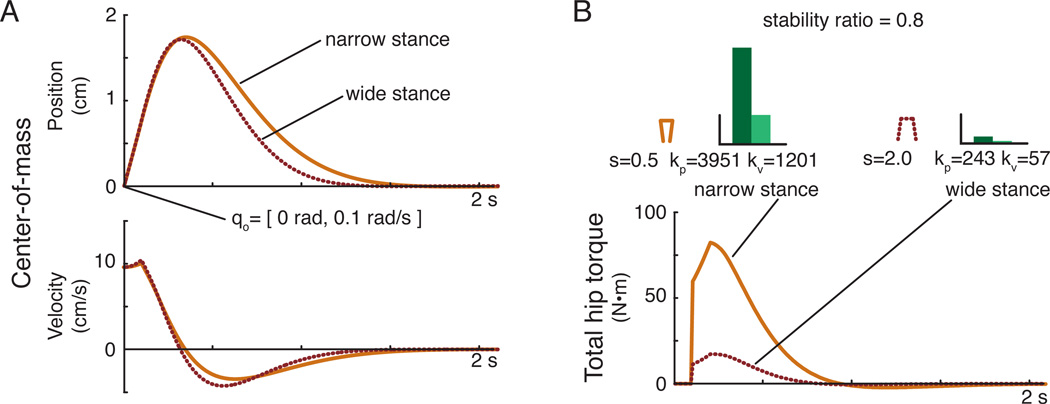
Robust motor behaviors emerge from neuromechanical interactions that are nonlinear, have delays, and contain redundant neural and biomechanical components. For example, in standing balance a subject's muscle activity (neural control) decreases as stance width (biomechanics) increases when responding to a lateral perturbation, yet the center-of-mass motion (behavior) is nearly identical regardless of stance width. We present stability radius, a technique from robust control theory, to overcome the limitations of classical stability analysis tools, such as gain margin, which are insufficient for predicting how concurrent changes in both biomechanics (plant) and neural control (controller) affect system behavior. We first present the theory and then an application to a neuromechanical model of frontal-plane standing balance with delayed feedback. We show that stability radius can quantify differences in the sensitivity of system behavior to parameter changes, and predict that narrowing stance width increases system robustness. We further demonstrate that selecting combinations of stance width (biomechanics) and feedback gains (neural control) that have the same stability radius produce similar center-of-mass behavior in simulation. Therefore, stability radius may provide a useful tool for understanding neuromechanical interactions in movement and could aid in the design of devices and therapies for improving motor function.
Figures
References
-
- Dorf RC, Bishop RH. Modern Control Systems, 9th ed. plus 0.5em minus 0.4em. Upper Saddle River, NJ: Prentice-Hall; 2000.
-
- Hinrichsen D, Pritchard A. Mathematical Systems Theory I: Modelling State Space Analysis, Stability and Robustness, 2nd ed. plus 0.5em minus 0.4em. Berlin, Heidelberg: Springer Verlag; 2005.
-
- Trefethen LN, Embree M. Spectra and Pseudospectra: The Behavior of Nonnormal Matrices and Operators. plus 0.5em minus 0.4em. Princeton, NJ: Princeton University Press; 2005.
-
- Hinrichsen D, Pritchard A. Stability radii of linear systems. Systems & Control Letters. 1986 Feb;7(1):1–10.
-
- Martin J. State-space measures for stability robustness. IEEE Transactions on Automatic Control. 1987 Jun;32(6):509–512.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
