

Choosing actions
- PMID: 23761769
- PMCID: PMC3669743
- DOI: 10.3389/fpsyg.2013.00273
Choosing actions
Abstract
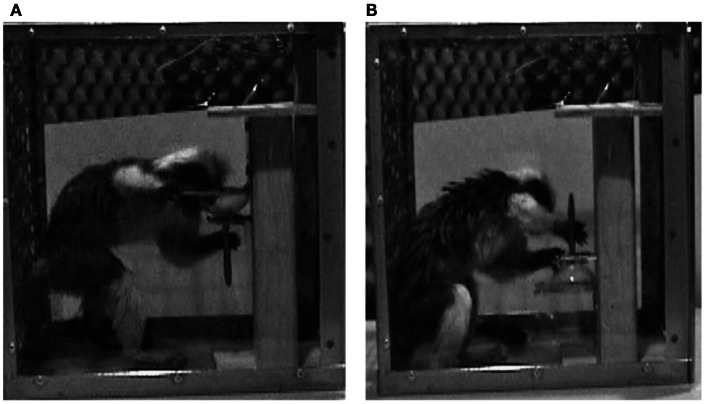
Actions that are chosen have properties that distinguish them from actions that are not. Of the nearly infinite possible actions that can achieve any given task, many of the unchosen actions are irrelevant, incorrect, or inappropriate. Others are relevant, correct, or appropriate but are disfavored for other reasons. Our research focuses on the question of what distinguishes actions that are chosen from actions that are possible but are not. We review studies that use simple preference methods to identify factors that contribute to action choices, especially for object-manipulation tasks. We can determine which factors are especially important through simple behavioral experiments.
Keywords: action selection; behavioral psychology; choosing actions; degrees-of-freedom problem; motor control.
Figures
References
-
- Abbs J. H. (1986). “Invariance and variability in speech production: a distinction between linguistic intent and its neuromotor implementation,” in Invariance and Variability in Speech Processes, eds Perkell J. S., Klatt D. H. (Hillsdale, NJ: Erlbaum; ), 202–219
-
- Alexander R. M. (1984). Walking and running. Am. Sci. 72, 348–354
-
- Bernstein N. (1967). The Coordination and Regulation of Movements. London: Pergamon
-
- Cai Q., Aggarwal J. K. (1999). Tracking human motion in structured environments using a distributed-camera system. IEEE Trans. Pattern Anal. Mach. Intell. 21, 1241–124710.1109/34.809119 - DOI
LinkOut - more resources
Full Text Sources
Other Literature Sources