

Robot-assisted and fluoroscopy-guided pedicle screw placement: a systematic review
- PMID: 23801017
- PMCID: PMC3906467
- DOI: 10.1007/s00586-013-2879-1
Robot-assisted and fluoroscopy-guided pedicle screw placement: a systematic review
Abstract
Purpose: At present, most spinal surgeons undertake pedicle screw implantation using either anatomical landmarks or C-arm fluoroscopy. Reported rates of screw malposition using these techniques vary considerably, though the evidence generally favors the use of image-guidance systems. A miniature spine-mounted robot has recently been developed to further improve the accuracy of pedicle screw placement. In this systematic review, we critically appraise the perceived benefits of robot-assisted pedicle screw placement compared to conventional fluoroscopy-guided technique.
Methods: The Cochrane Central Register of Controlled Trials, PubMed, and EMBASE databases were searched between January 2006 and January 2013 to identify relevant publications that (1) featured placement of pedicle screws, (2) compared robot-assisted and fluoroscopy-guided surgery, (3) assessed outcome in terms of pedicle screw position, and (4) present sufficient data in each arm to enable meaningful comparison (>10 pedicle screws in each study group).
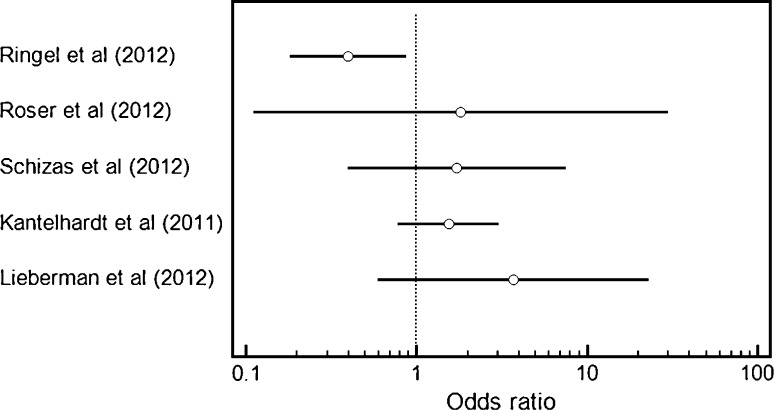
Results: A total of 246 articles were retrieved, of which 5 articles met inclusion criteria, collectively reporting placement of 1,308 pedicle screws (729 robot-assisted, 579 fluoroscopy-guided). The findings of these studies are mixed, with limited higher level of evidence data favoring fluoroscopy-guided procedures, and remaining comparative studies supporting robot-assisted pedicle screw placement.
Conclusions: There is insufficient evidence to unequivocally recommend one surgical technique over the other. Given the high cost of robotic systems, and the high risk of spinal surgery, further high quality studies are required to address unresolved clinical equipoise in this field.
Figures

References
-
- Barzilay Y, Liebergall M, Fridlander A, Knoller N. Miniature robotic guidance for spine surgery—introduction of a novel system and analysis of challenges encountered during the clinical development phase at two spine centres. Int J Med Robot Comput Assist Surg. 2006;2(2):146–153. doi: 10.1002/rcs.90. - DOI - PubMed
-
- Devito DP, Kaplan L, Dietl R, Pfeiffer M, Horne D, Silberstein B, Hardenbrook M, Kiriyanthan G, Barzilay Y, Bruskin A, Sackerer D, Alexandrovsky V, Stuer C, Burger R, Maeurer J, Donald GD, Schoenmayr R, Friedlander A, Knoller N, Schmieder K, Pechlivanis I, Kim IS, Meyer B, Shoham M. Clinical acceptance and accuracy assessment of spinal implants guided with SpineAssist surgical robot: retrospective study. Spine (Phila Pa 1976) 2010;35(24):2109–2115. doi: 10.1097/BRS.0b013e3181d323ab. - DOI - PubMed
-
- Gelalis ID, Paschos NK, Pakos EE, Politis AN, Arnaoutoglou CM, Karageorgos AC, Ploumis A, Xenakis TA. Accuracy of pedicle screw placement: a systematic review of prospective in vivo studies comparing free hand, fluoroscopy guidance and navigation techniques. Eur Spine J. 2012;21(2):247–255. doi: 10.1007/s00586-011-2011-3. - DOI - PMC - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
Miscellaneous
