

MUNDUS project: MUltimodal neuroprosthesis for daily upper limb support
- PMID: 23822118
- PMCID: PMC3733825
- DOI: 10.1186/1743-0003-10-66
MUNDUS project: MUltimodal neuroprosthesis for daily upper limb support
Abstract
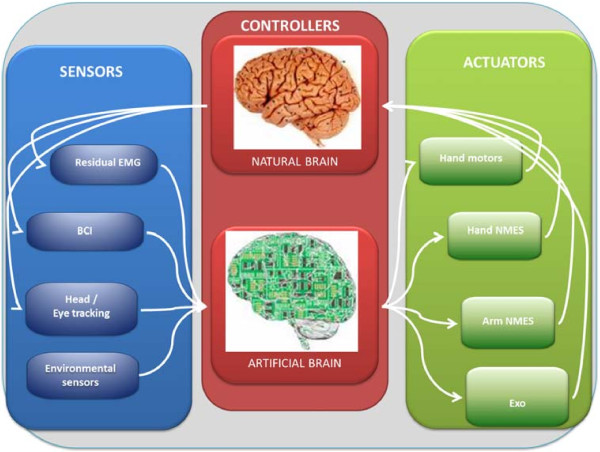
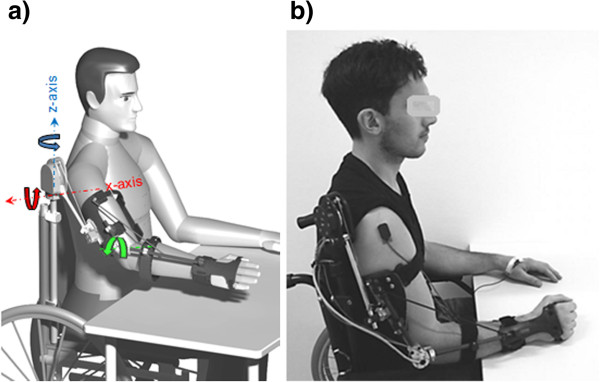
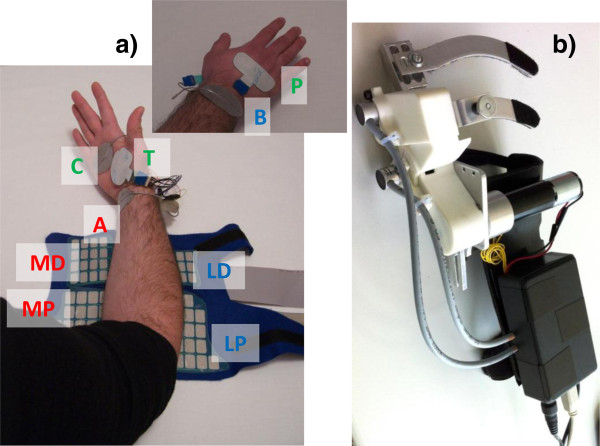
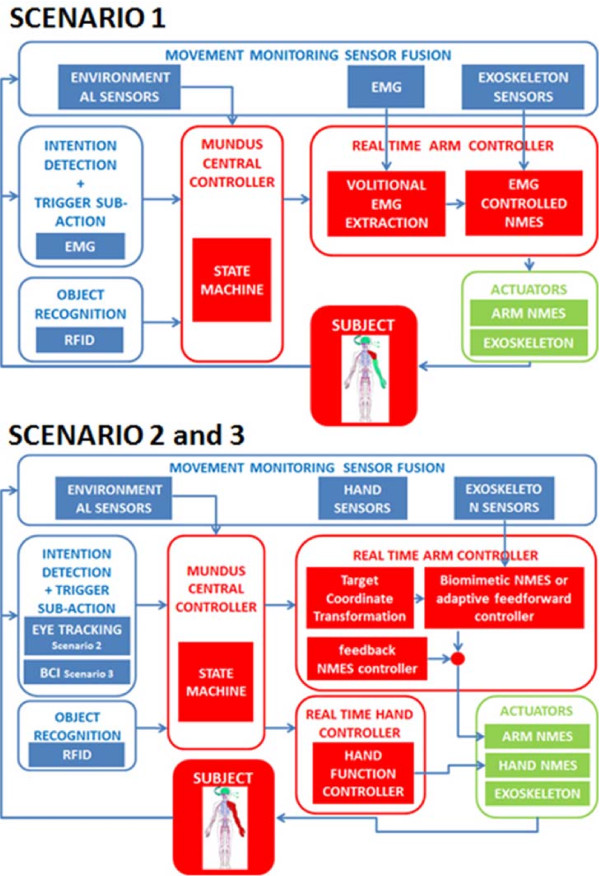
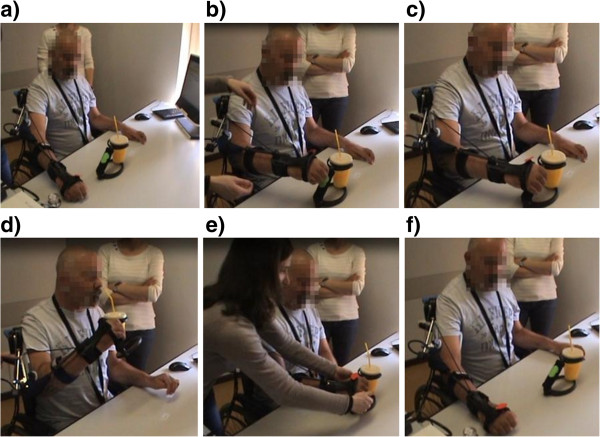
Background: MUNDUS is an assistive framework for recovering direct interaction capability of severely motor impaired people based on arm reaching and hand functions. It aims at achieving personalization, modularity and maximization of the user's direct involvement in assistive systems. To this, MUNDUS exploits any residual control of the end-user and can be adapted to the level of severity or to the progression of the disease allowing the user to voluntarily interact with the environment. MUNDUS target pathologies are high-level spinal cord injury (SCI) and neurodegenerative and genetic neuromuscular diseases, such as amyotrophic lateral sclerosis, Friedreich ataxia, and multiple sclerosis (MS). The system can be alternatively driven by residual voluntary muscular activation, head/eye motion, and brain signals. MUNDUS modularly combines an antigravity lightweight and non-cumbersome exoskeleton, closed-loop controlled Neuromuscular Electrical Stimulation for arm and hand motion, and potentially a motorized hand orthosis, for grasping interactive objects.
Methods: The definition of the requirements and of the interaction tasks were designed by a focus group with experts and a questionnaire with 36 potential end-users.
Results: The functionality of all modules has been successfully demonstrated. User's intention was detected with a 100% success. Averaging all subjects and tasks, the minimum evaluation score obtained was 1.13 ± 0.99 for the release of the handle during the drinking task, whilst all the other sub-actions achieved a mean value above 1.6. All users, but one, subjectively perceived the usefulness of the assistance and could easily control the system. Donning time ranged from 6 to 65 minutes, scaled on the configuration complexity.
Conclusions: The MUNDUS platform provides functional assistance to daily life activities; the modules integration depends on the user's need, the functionality of the system have been demonstrated for all the possible configurations, and preliminary assessment of usability and acceptance is promising.
Figures
References
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
Molecular Biology Databases
