

Temperature-memory polymer actuators
- PMID: 23836673
- PMCID: PMC3732955
- DOI: 10.1073/pnas.1301895110
Temperature-memory polymer actuators
Abstract
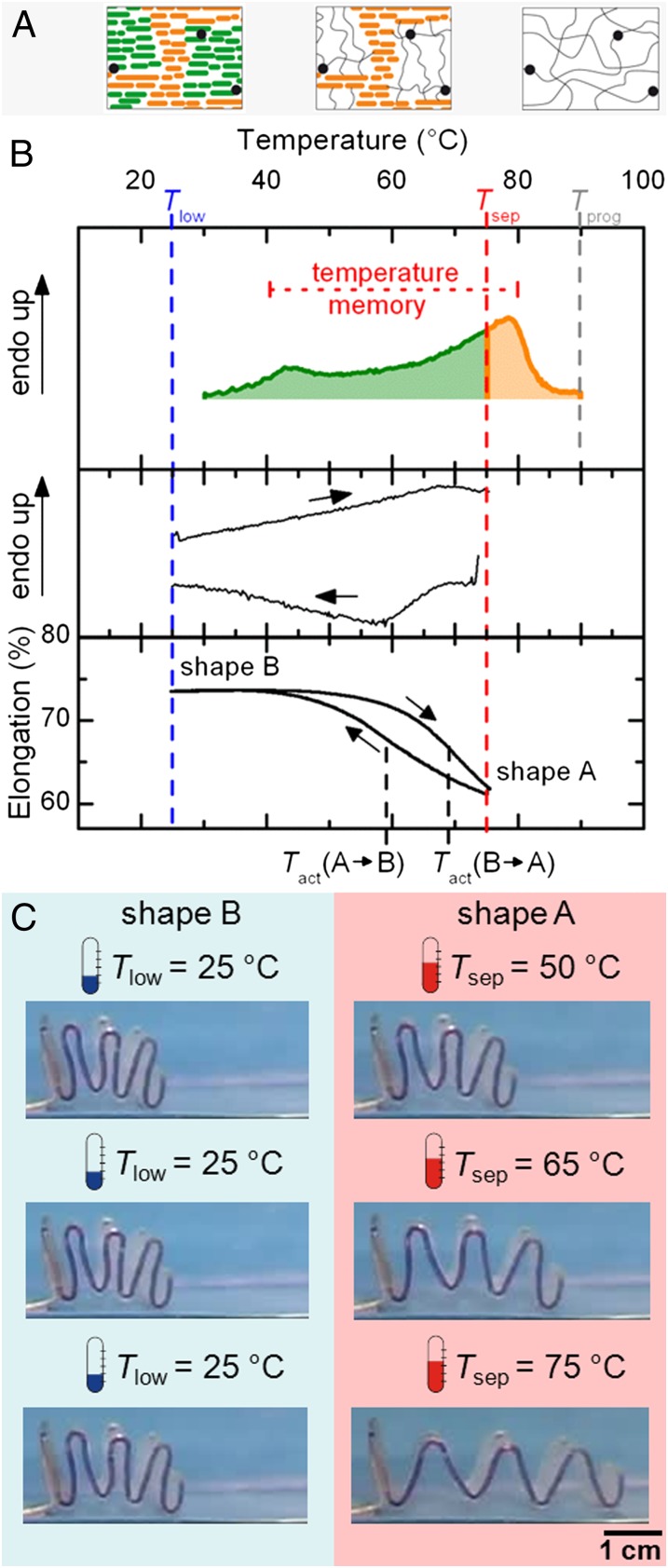
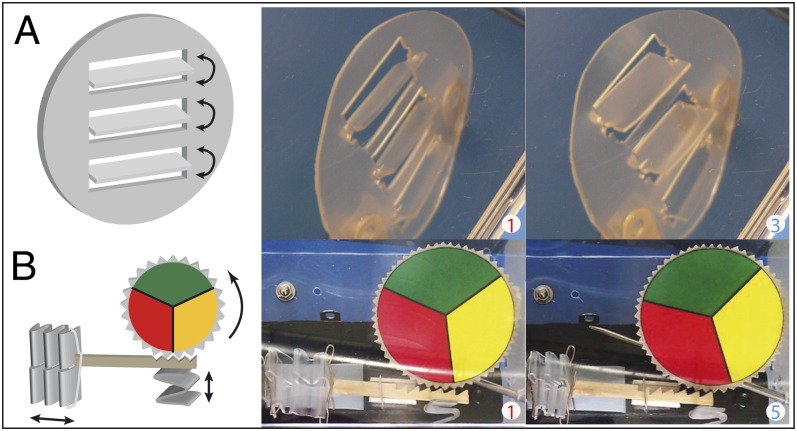
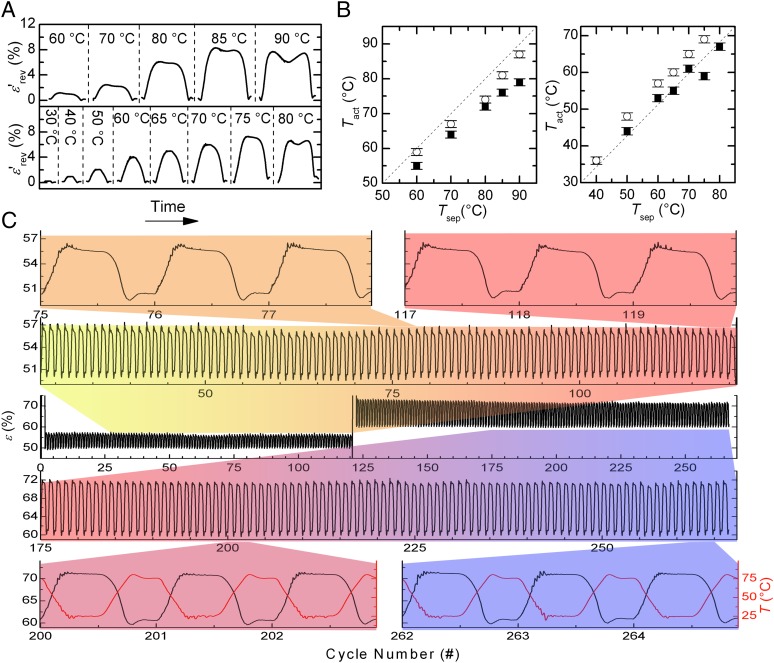
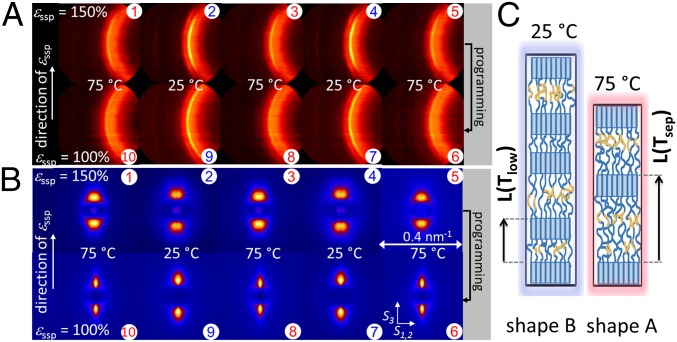
Reading out the temperature-memory of polymers, which is their ability to remember the temperature where they were deformed recently, is thus far unavoidably linked to erasing this memory effect. Here temperature-memory polymer actuators (TMPAs) based on cross-linked copolymer networks exhibiting a broad melting temperature range (ΔT(m)) are presented, which are capable of a long-term temperature-memory enabling more than 250 cyclic thermally controlled actuations with almost constant performance. The characteristic actuation temperatures T(act)s of TMPAs can be adjusted by a purely physical process, guiding a directed crystallization in a temperature range of up to 40 °C by variation of the parameter T(sep) in a nearly linear correlation. The temperature T(sep) divides ΔT(m) into an upper T(m) range (T > T(sep)) forming a reshapeable actuation geometry that determines the skeleton and a lower T(m) range (T < T(sep)) that enables the temperature-controlled bidirectional actuation by crystallization-induced elongation and melting-induced contraction. The macroscopic bidirectional shape changes in TMPAs could be correlated with changes in the nanostructure of the crystallizable domains as a result of in situ X-ray investigations. Potential applications of TMPAs include heat engines with adjustable rotation rate and active building facades with self-regulating sun protectors.
Keywords: active movement; reversible shape-memory polymer.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
References
-
- De Gennes PG. One type of nematic polymers. Roy Acad. Sci Ser B. 1975;281(5-8):101–103.
-
- Adams JM, Warner M, Stenull O, Lubensky TC. Smectic-A elastomers with weak director anchoring. Phys Rev E Stat Nonlin Soft Matter Phys. 2008;78(1 Pt 1):011703. - PubMed
-
- Chung T, Romo-Uribe A, Mather PT. Two-way reversible shape memory in a semicrystalline network. Macromolecules. 2008;41(1):184–192.
-
- Zotzmann J, Behl M, Hofmann D, Lendlein A. Reversible triple-shape effect of polymer networks containing polypentadecalactone- and poly(ε-caprolactone)-segments. Adv Mater. 2010;22(31):3424–3429. - PubMed
-
- Stuart MAC, et al. Emerging applications of stimuli-responsive polymer materials. Nat Mater. 2010;9(2):101–113. - PubMed
Publication types
MeSH terms
Substances
LinkOut - more resources
Full Text Sources
Other Literature Sources
