

Cerebellar ataxia impairs modulation of arm stiffness during postural maintenance
- PMID: 23843434
- PMCID: PMC4042412
- DOI: 10.1152/jn.00294.2013
Cerebellar ataxia impairs modulation of arm stiffness during postural maintenance
Abstract
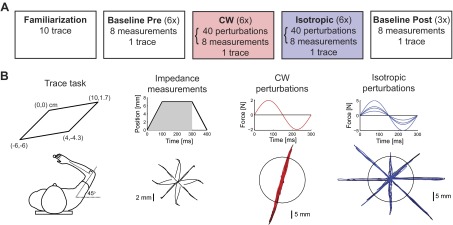
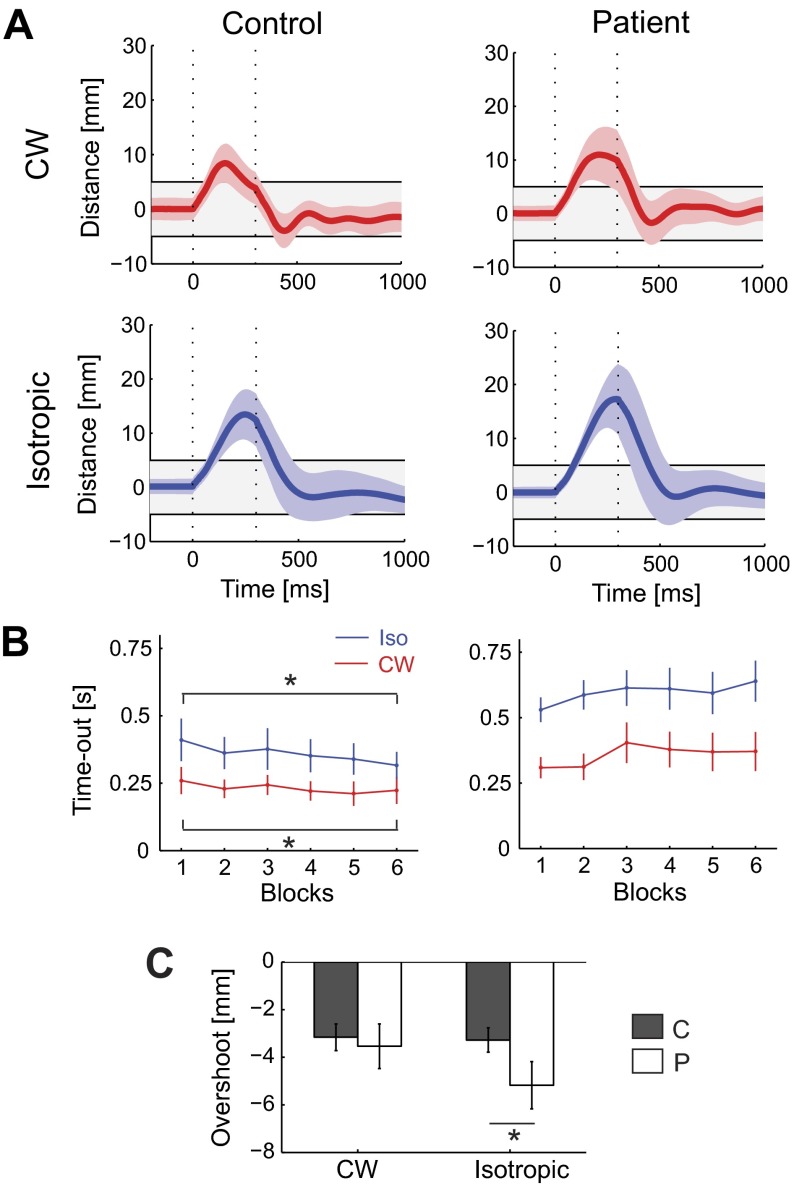
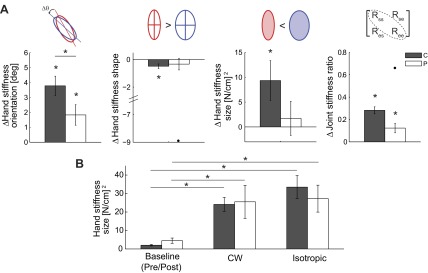
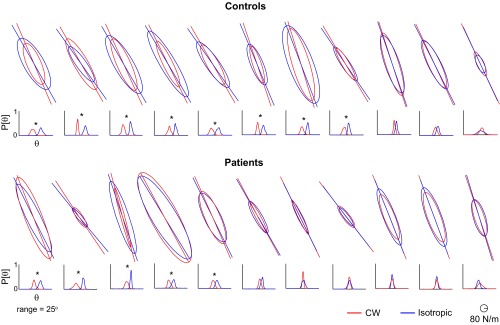
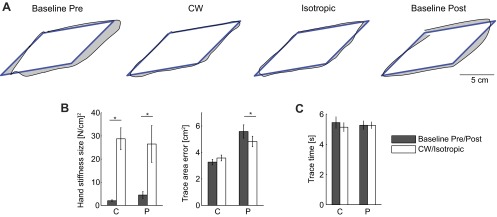
Impedance control enables humans to effectively interact with their environment during postural and movement tasks, adjusting the mechanical behavior of their limbs to account for instability. Previous work has shown that people are able to selectively modulate the end-point stiffness of their arms, adjusting for varying directions of environmental disturbances. Behavioral studies also suggest that separate controllers are used for impedance modulation versus joint torque coordination. Here we tested whether people with cerebellar damage have deficits in impedance control. It is known that these individuals have poor motor coordination, which has typically been attributed to deficits in joint torque control. Subjects performed a static postural maintenance task with two different types of directional force perturbations. On average, patients with cerebellar ataxia modified stiffness differentially for the two perturbation conditions, although significantly less than age-matched control subjects. Thus cerebellar damage may impair the ability to modulate arm impedance. Surprisingly, the patients' intact ability to generally alter their limb stiffness during the postural task (albeit less than age-matched control subjects) improved their movement performance in a subsequent tracing task. The transfer of stiffness control from the static to the movement task may be a strategy that can be used by patients to compensate for their motor deficits.
Keywords: arm stiffness; cerebellar ataxia; impedance control.
Figures
Similar articles
-
Does a basic deficit in force control underlie cerebellar ataxia?J Neurophysiol. 2013 Feb;109(4):1107-16. doi: 10.1152/jn.00152.2012. Epub 2012 Nov 21. J Neurophysiol. 2013. PMID: 23175807 Free PMC article.
-
Effect of age on stiffness modulation during postural maintenance of the arm.IEEE Int Conf Rehabil Robot. 2013 Jun;2013:6650395. doi: 10.1109/ICORR.2013.6650395. IEEE Int Conf Rehabil Robot. 2013. PMID: 24187214 Free PMC article.
-
Cerebellar ataxia: torque deficiency or torque mismatch between joints?J Neurophysiol. 2000 May;83(5):3019-30. doi: 10.1152/jn.2000.83.5.3019. J Neurophysiol. 2000. PMID: 10805697 Clinical Trial.
-
Postural responses to multidirectional stance perturbations in cerebellar ataxia.Exp Neurol. 2006 Nov;202(1):21-35. doi: 10.1016/j.expneurol.2006.05.008. Epub 2006 Jun 30. Exp Neurol. 2006. PMID: 16808916
-
Cerebellar ataxia.Handb Clin Neurol. 2018;159:261-281. doi: 10.1016/B978-0-444-63916-5.00017-3. Handb Clin Neurol. 2018. PMID: 30482319 Review.
Cited by
-
Predicting and correcting ataxia using a model of cerebellar function.Brain. 2014 Jul;137(Pt 7):1931-44. doi: 10.1093/brain/awu115. Epub 2014 May 8. Brain. 2014. PMID: 24812203 Free PMC article.
References
-
- Asaka T, Wang Y. Feedforward postural muscle modes and multi-mode coordination in mild cerebellar ataxia. Exp Brain Res 210: 153–163, 2011 - PubMed
-
- Ball SJ, Brown IE, Scott SH. A planar 3DOF robotic exoskeleton for rehabilitation and assessment. Conf Proc IEEE Eng Med Biol Soc 2007: 4024–4027, 2007 - PubMed
-
- Bastian AJ. Learning to predict the future: the cerebellum adapts feedforward movement control. Curr Opin Neurobiol 16: 645–649, 2006 - PubMed
-
- Bastian AJ, Martin TA, Keating JG, Thach WT. Cerebellar ataxia: abnormal control of interaction torques across multiple joints. J Neurophysiol 76: 492–509, 1996 - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources