

doi: 10.3390/s130709396.
A mobile robots experimental environment with event-based wireless communication
Affiliations
- PMID: 23881139
- PMCID: PMC3758655
- DOI: 10.3390/s130709396
Item in Clipboard
A mobile robots experimental environment with event-based wireless communication
Sensors (Basel).
.
Abstract
An experimental platform to communicate between a set of mobile robots through a wireless network has been developed. The mobile robots get their position through a camera which performs as sensor. The video images are processed in a PC and a Waspmote card sends the corresponding position to each robot using the ZigBee standard. A distributed control algorithm based on event-triggered communications has been designed and implemented to bring the robots into the desired formation. Each robot communicates to its neighbors only at event times. Furthermore, a simulation tool has been developed to design and perform experiments with the system. An example of usage is presented.
Figures

Block diagram of the platform architecture.

(a) The NXT LEGO robot, (b) Isosceles triangle formed by the LEDs.

User interface of the Camera LabVIEW App.

Data packet structure.

Illustrative example of the simulation tool. A multi-agent system with four agents is simulated. Note that the control actions are constant between two communication events.

Communication graph describing one-dimensional network topology.
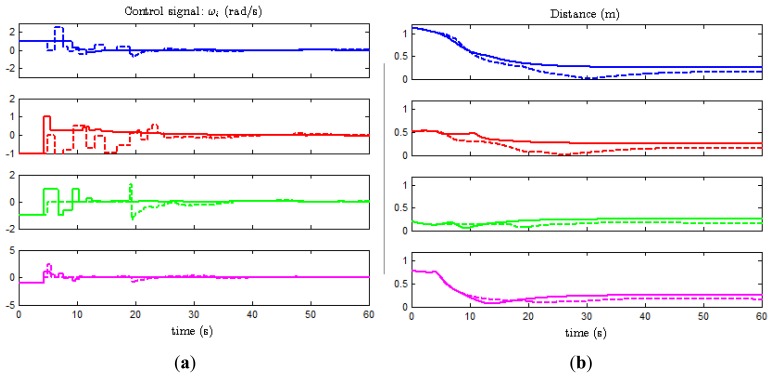
Comparative of simulation and experimental results: (a) Control signal, (b) Distance to formation.

View of the real experiment at t = 0, 6, 12, and 24 s.

Comparison of the results obtained for event-trigger and time-trigger experiments.
References
-
- Franchi L., Freda G.O., Vendittelli M. The sensor-based random graph method for cooperative robot exploration. IEEE ASME Trans. Mechatron. 2009;14:163–175.
-
- Magnenat S., Rétornaz P., Bonani M., Longchamp V., Mondada F. ASEBA: A modular architecture for event-based control of complex robots. IEEE ASME Trans. Mechatron. 2011;6:321–329.
-
- Olfati-Saber R., Fax J., Murray R. Consensus and cooperation in networked multi-agent systems. IEEE Proc. 2007;95:215–233.
-
- Lian F.-L., Moyne J., Tilbury D. Network design consideration for distributed control systems. IEEE Trans. Control Syst. Technol. 2002;10:297–307.
-
- Aström K., Bernhardsson B. Comparison of Riemann and Lebesgue Sampling for First Order Stochastic Systems. Proceedings of IEEE Conference on Decision and Control; Las Vegas, NA, USA. 10–13 December 2002; pp. 2011–2016.
Publication types
LinkOut - more resources
Full Text Sources
Other Literature Sources
