

Guiding locomotion in complex, dynamic environments
- PMID: 23885238
- PMCID: PMC3716022
- DOI: 10.3389/fnbeh.2013.00085
Guiding locomotion in complex, dynamic environments
Abstract
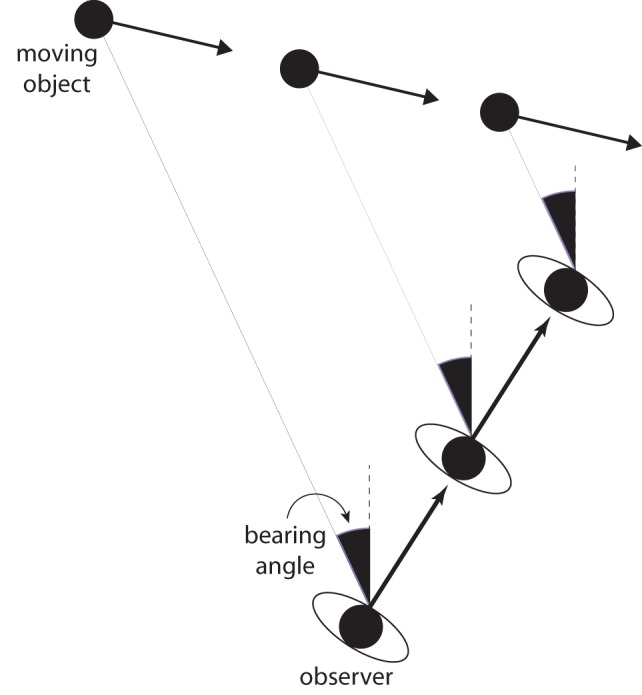
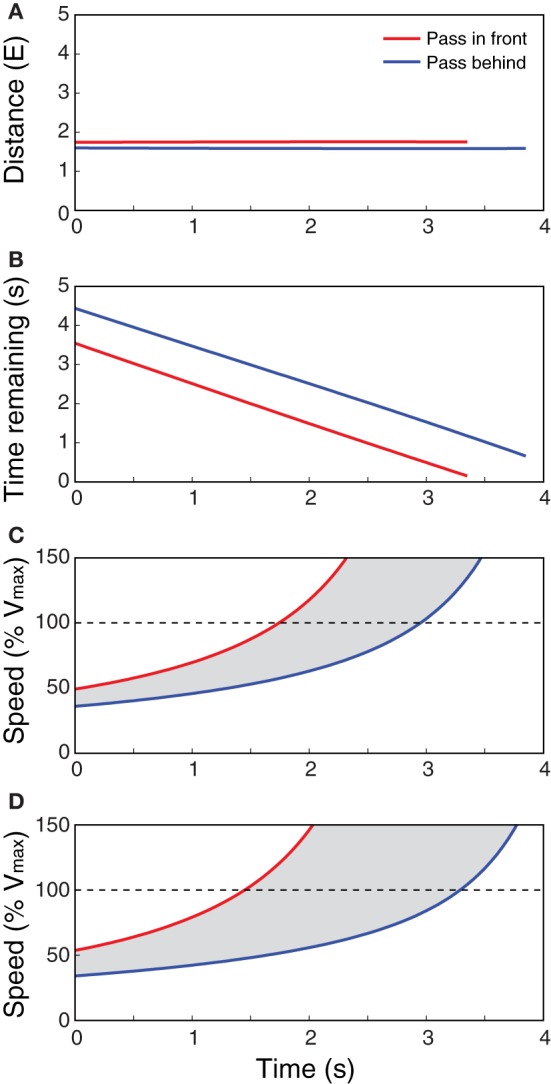
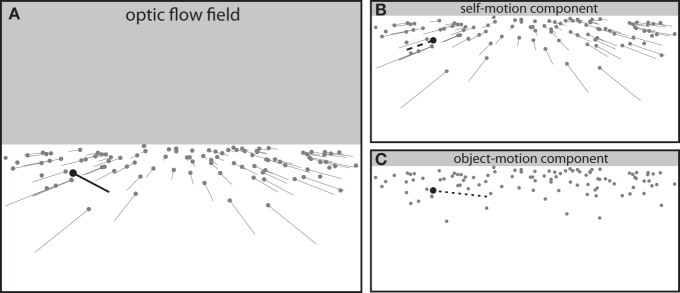
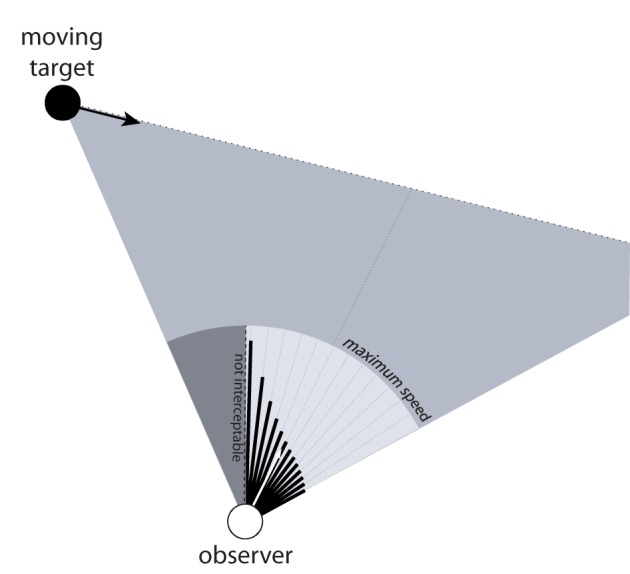
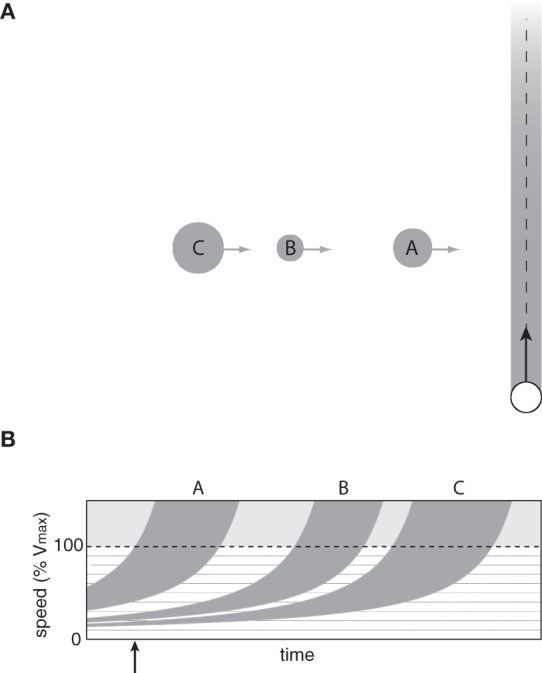
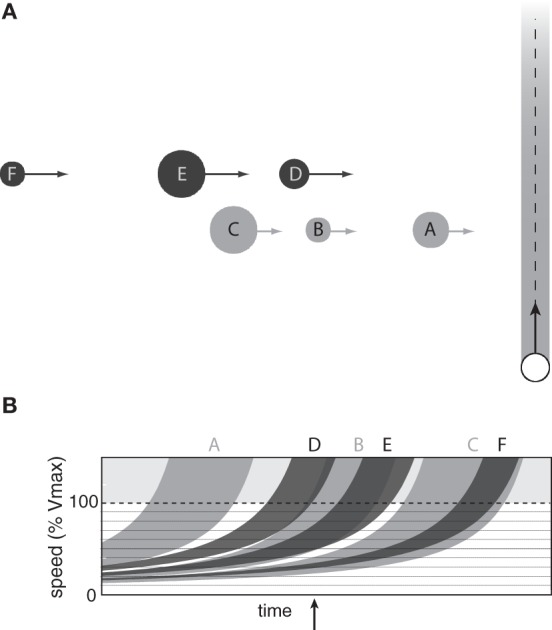
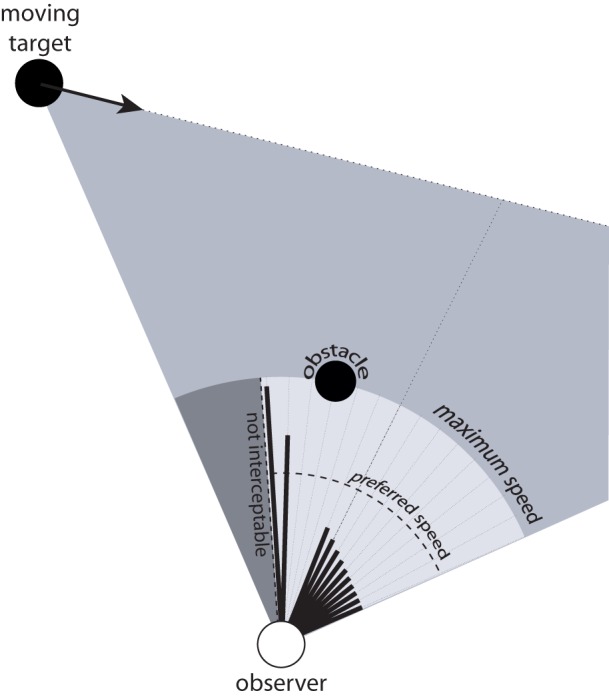
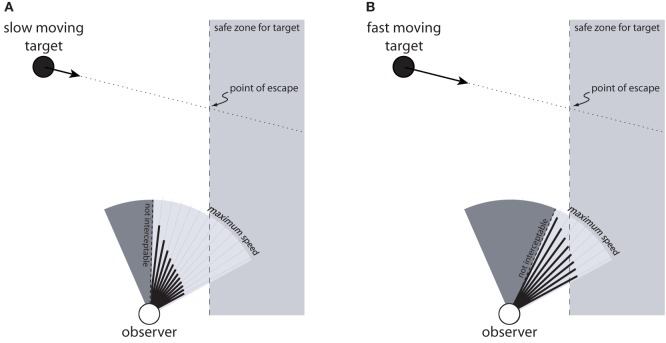
Locomotion in complex, dynamic environments is an integral part of many daily activities, including walking in crowded spaces, driving on busy roadways, and playing sports. Many of the tasks that humans perform in such environments involve interactions with moving objects-that is, they require people to coordinate their own movement with the movements of other objects. A widely adopted framework for research on the detection, avoidance, and interception of moving objects is the bearing angle model, according to which observers move so as to keep the bearing angle of the object constant for interception and varying for obstacle avoidance. The bearing angle model offers a simple, parsimonious account of visual control but has several significant limitations and does not easily scale up to more complex tasks. In this paper, I introduce an alternative account of how humans choose actions and guide locomotion in the presence of moving objects. I show how the new approach addresses the limitations of the bearing angle model and accounts for a variety of behaviors involving moving objects, including (1) choosing whether to pass in front of or behind a moving obstacle, (2) perceiving whether a gap between a pair of moving obstacles is passable, (3) avoiding a collision while passing through single or multiple lanes of traffic, (4) coordinating speed and direction of locomotion during interception, (5) simultaneously intercepting a moving target while avoiding a stationary or moving obstacle, and (6) knowing whether to abandon the chase of a moving target. I also summarize data from recent studies that support the new approach.
Keywords: affordance perception; locomotion; object motion perception; obstacle avoidance; optic flow.
Figures
References
-
- Bootsma R. J., Craig C. M. (2002). Global and local contributions to the optical specification of time to contact: observer sensitivity to composite tau. Perception 31, 901–924 - PubMed
LinkOut - more resources
Full Text Sources
Other Literature Sources
Miscellaneous