

Humans perceive object motion in world coordinates during obstacle avoidance
- PMID: 23887048
- PMCID: PMC3726133
- DOI: 10.1167/13.8.25
Humans perceive object motion in world coordinates during obstacle avoidance
Abstract
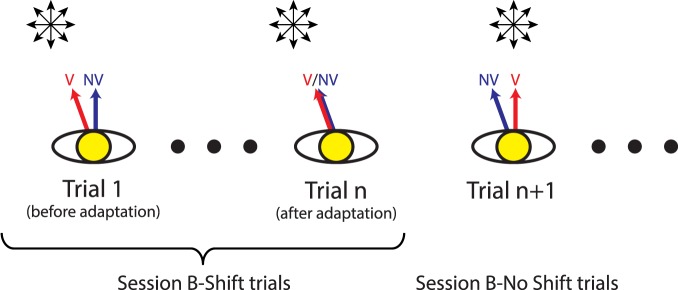
A fundamental question about locomotion in the presence of moving objects is whether movements are guided based upon perceived object motion in an observer-centered or world-centered reference frame. The former captures object motion relative to the moving observer and depends on both observer and object motion. The latter captures object motion relative to the stationary environment and is independent of observer motion. Subjects walked through a virtual environment (VE) viewed through a head-mounted display and indicated whether they would pass in front of or behind a moving obstacle that was on course to cross their future path. Subjects' movement through the VE was manipulated such that object motion in observer coordinates was affected while object motion in world coordinates was the same. We found that when moving observers choose routes around moving obstacles, they rely on object motion perceived in world coordinates. This entails a process, which has been called flow parsing (Rushton & Warren, 2005; Warren & Rushton, 2009a), that recovers the component of optic flow due to object motion independent of self-motion. We found that when self-motion is real and actively generated, the process by which object motion is recovered relies on both visual and nonvisual information to factor out the influence of self-motion. The remaining component contains information about object motion in world coordinates that is needed to guide locomotion.
Keywords: flow parsing; locomotion; moving objects; obstacle avoidance; optic flow.
Figures





References
-
- Campos J. L., Byrne P., Sun H. J. (2010). The brain weights body-based cues higher than vision when estimating walked distances. European Journal of Neuroscience, 31 (10), 1889–1898 - PubMed
-
- Chardenon A., Montagne G., Laurent M., Bootsma R. J. (2005). A robust solution for dealing with environmental changes in intercepting moving balls. Journal of Motor Behavior, 37 (1), 52–64 - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
