Critical damping conditions for third order muscle models: implications for force control
- PMID: 23896614
- PMCID: PMC3792406
- DOI: 10.1115/1.4025110
Critical damping conditions for third order muscle models: implications for force control
Abstract
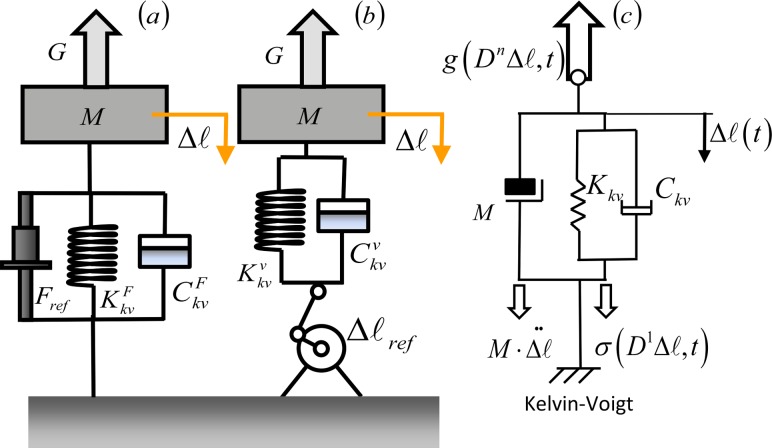
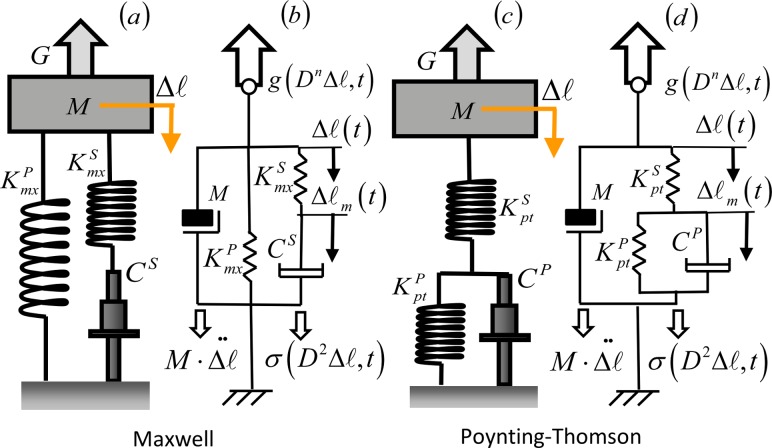
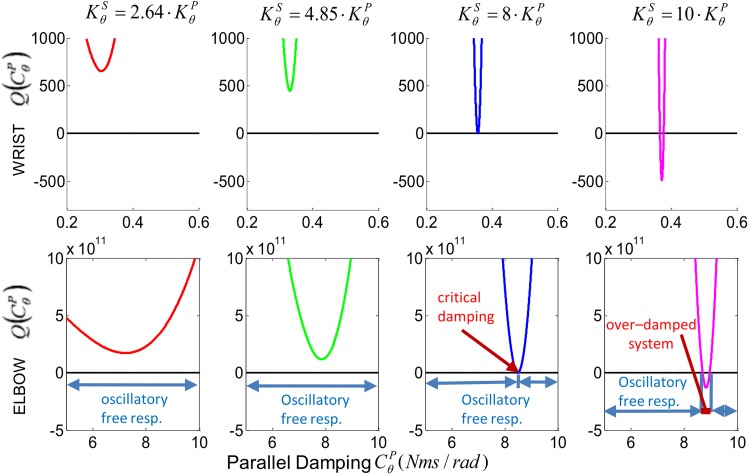
Experimental results presented in the literature suggest that humans use a position control strategy to indirectly control force rather than direct force control. Modeling the muscle-tendon system as a third-order linear model, we provide an explanation of why an indirect force control strategy is preferred. We analyzed a third-order muscle system and verified that it is required for a faithful representation of muscle-tendon mechanics, especially when investigating critical damping conditions. We provided numerical examples using biomechanical properties of muscles and tendons reported in the literature. We demonstrated that at maximum isotonic contraction, for muscle and tendon stiffness within physiologically compatible ranges, a third-order muscle-tendon system can be under-damped. Over-damping occurs for values of the damping coefficient included within a finite interval defined by two separate critical limits (such interval is a semi-infinite region in second-order models). An increase in damping beyond the larger critical value would lead the system to mechanical instability. We proved the existence of a theoretical threshold for the ratio between tendon and muscle stiffness above which critical damping can never be achieved; thus resulting in an oscillatory free response of the system, independently of the value of the damping. Under such condition, combined with high muscle activation, oscillation of the system can be compensated only by active control.
Figures
References
-
- Seraji, H. , 1994, “Adaptive Admittance Control: An Approach To Explicit Force Control in Compliant Motion,” Robotics and Automation, 1994, Proceedings of the 1994 IEEE International Conference, Vol. 2704, pp. 2705–2712.
-
- Siciliano, B. , and Villani, L. , 1999, Robot Force Control, Kluwer Academic, Boston.
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources