

Accelerated multi-shot diffusion imaging
- PMID: 24006236
- PMCID: PMC3942374
- DOI: 10.1002/mrm.24919
Accelerated multi-shot diffusion imaging
Abstract
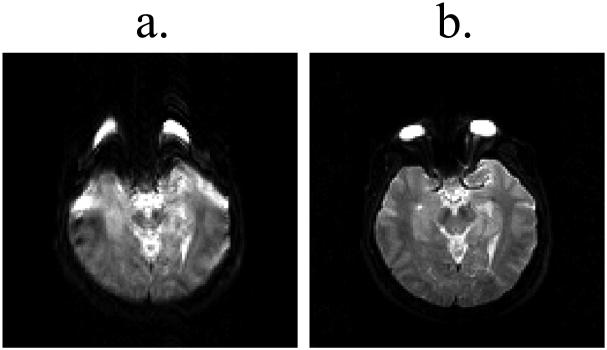
Purpose: To reduce image distortion in MR diffusion imaging using an accelerated multi-shot method.
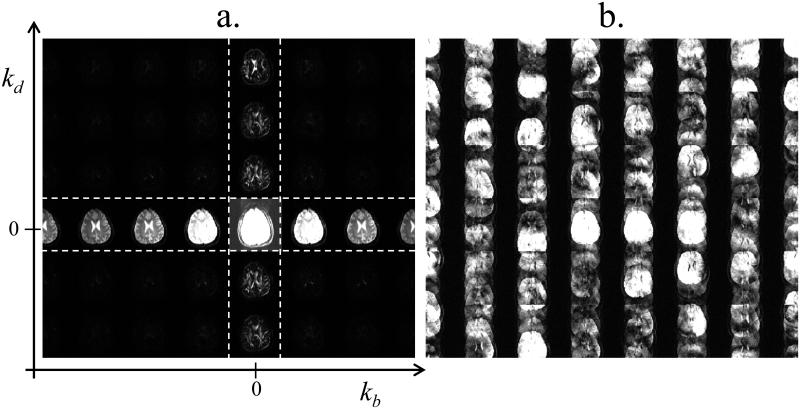
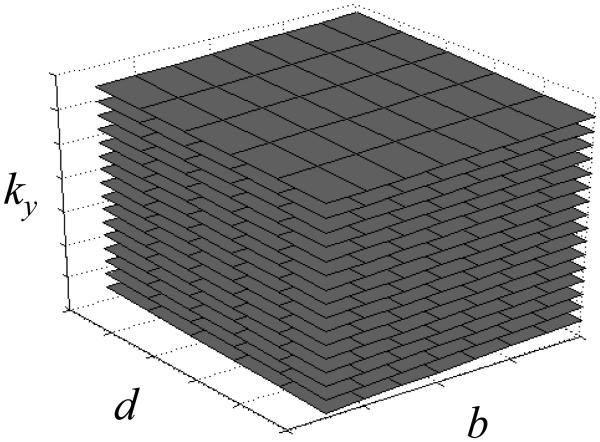
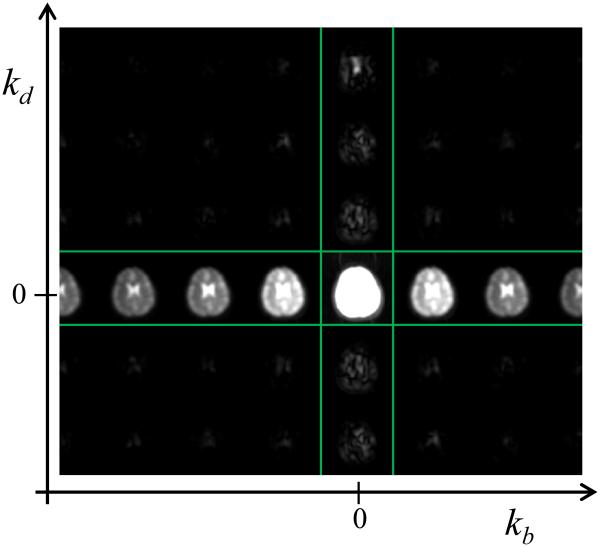
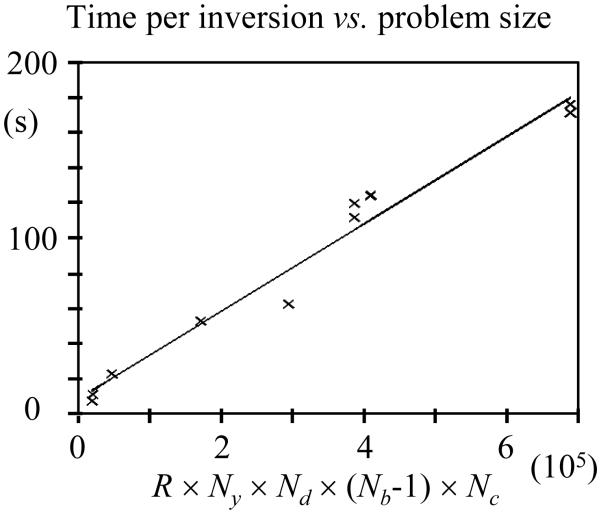
Methods: The proposed method exploits the fact that diffusion-encoded data tend to be sparse when represented in the kb-kd space, where kb and kd are the Fourier transform duals of b and d, the b-factor and the diffusion direction, respectively. Aliasing artifacts are displaced toward under-used regions of the kb-kd plane, allowing nonaliased signals to be recovered. A main characteristic of the proposed approach is how thoroughly the navigator information gets used during reconstruction: The phase of navigator images is used for motion correction, while the magnitude of the navigator signal in kb-kd space is used for regularization purposes. As opposed to most acceleration methods based on compressed sensing, the proposed method reduces the number of ky lines needed for each diffusion-encoded image, but not the total number of images required. Consequently, it tends to be most effective at reducing image distortion rather than reducing total scan time.
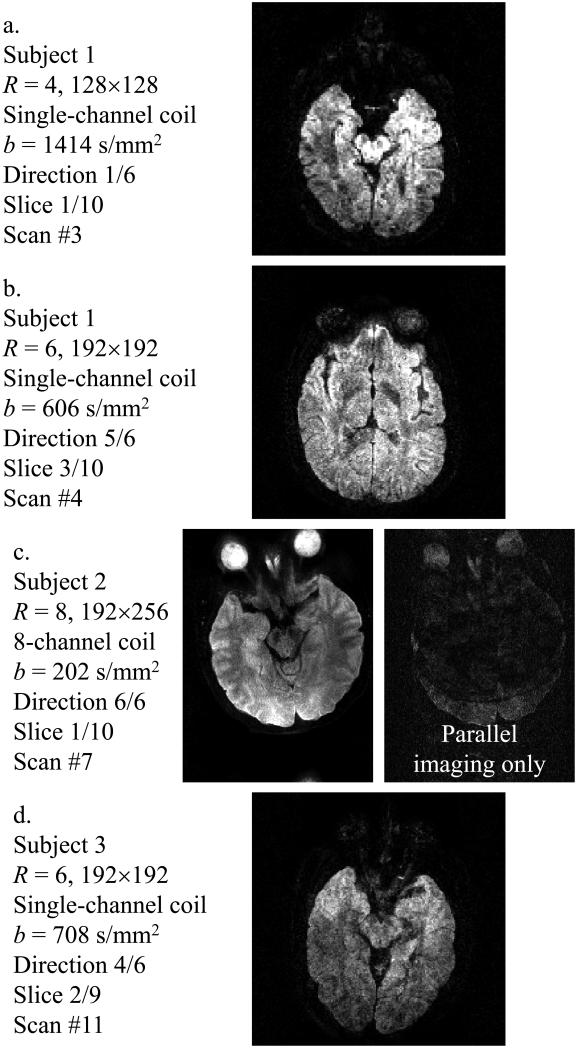
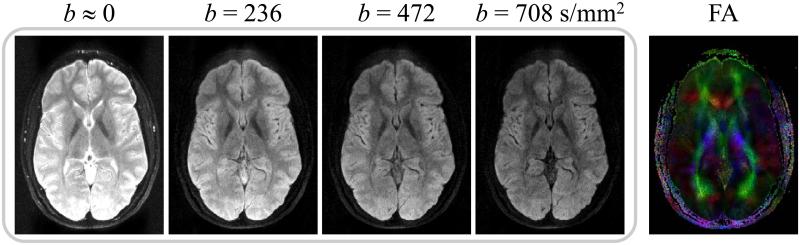
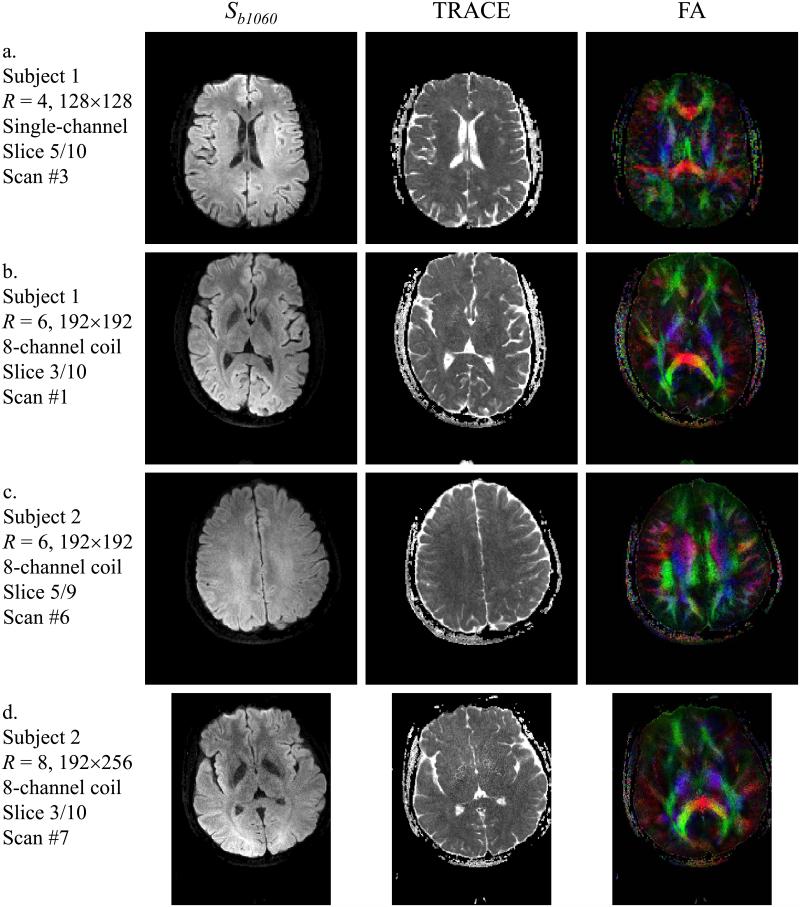
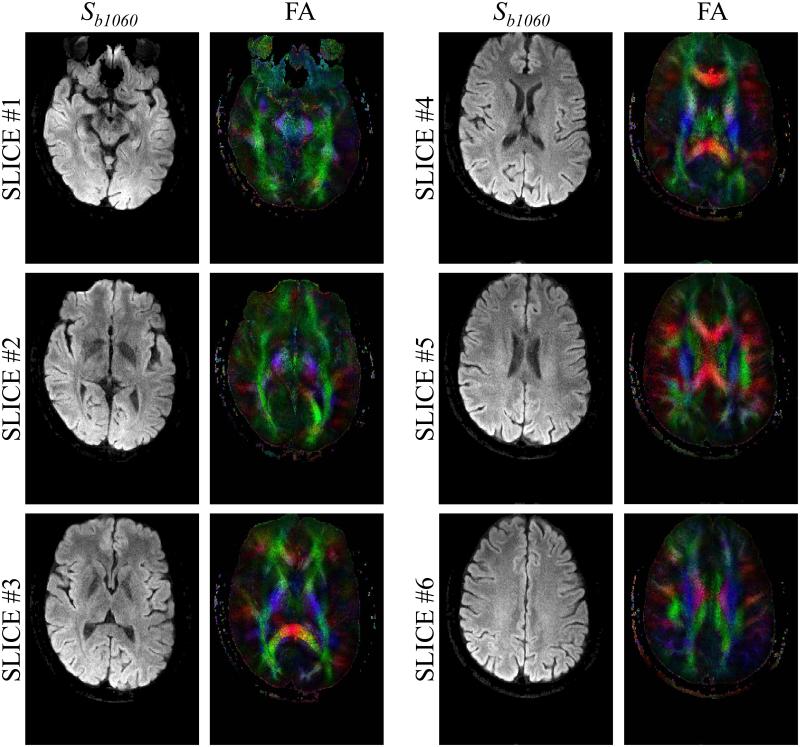
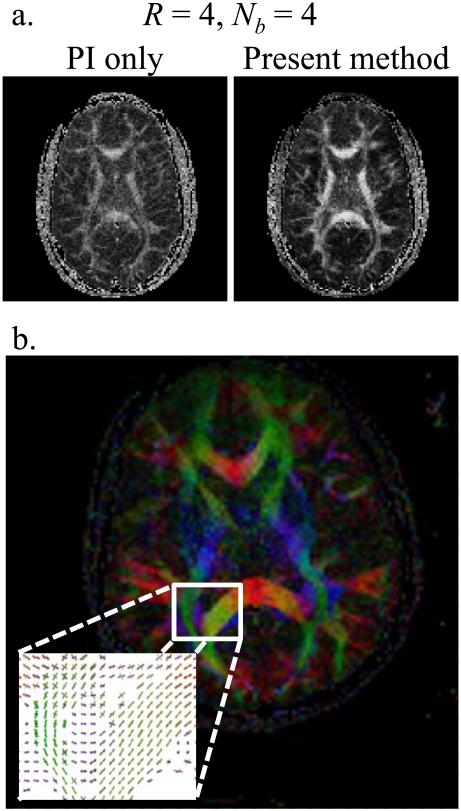
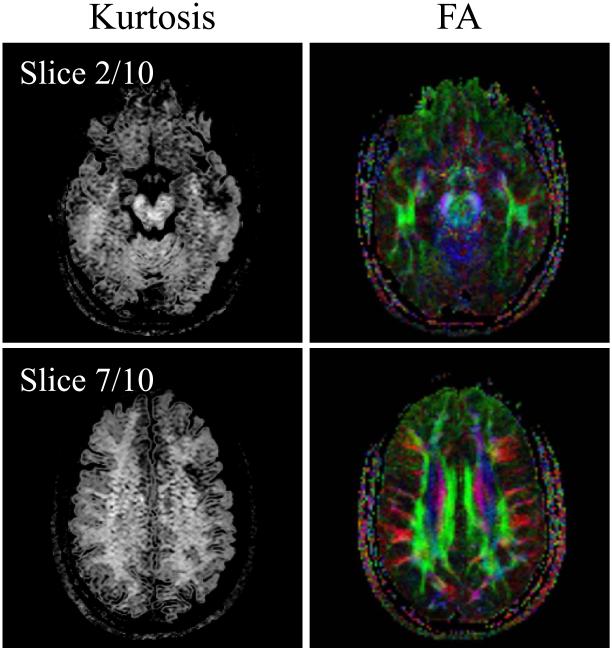
Results: Results are presented for three volunteers with acceleration factors ranging from 4 to 8, with and without the inclusion of parallel imaging.
Conclusion: An accelerated motion-corrected diffusion imaging method was introduced that achieves good image quality at relatively high acceleration factors.
Keywords: accelerated imaging; diffusion imaging; multi-shot EPI; navigator echoes.
Copyright © 2013 Wiley Periodicals, Inc.
Figures
References
-
- Atkinson D, Counsell S, Hajnal JV, Batchelor PG, Hill DL, Larkman DJ. Nonlinear phase correction of navigated multi-coil diffusion images. Magn Reson Med. 2006;56(5):1135–1139. - PubMed
-
- Anderson AW, Gore JC. Analysis and correction of motion artifacts in diffusion weighted imaging. Magn Reson Med. 1994;32(3):379–387. - PubMed
-
- Butts K, de Crespigny A, Pauly JM, Moseley M. Diffusion-weighted interleaved echo-planar imaging with a pair of orthogonal navigator echoes. Magn Reson Med. 1996;35(5):763–770. - PubMed
-
- Miller KL, Pauly JM. Nonlinear phase correction for navigated diffusion imaging. Magn Reson Med. 2003;50(2):343–353. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Research Materials
