

Human detection from a mobile robot using fusion of laser and vision information
- PMID: 24008280
- PMCID: PMC3821300
- DOI: 10.3390/s130911603
Human detection from a mobile robot using fusion of laser and vision information
Abstract
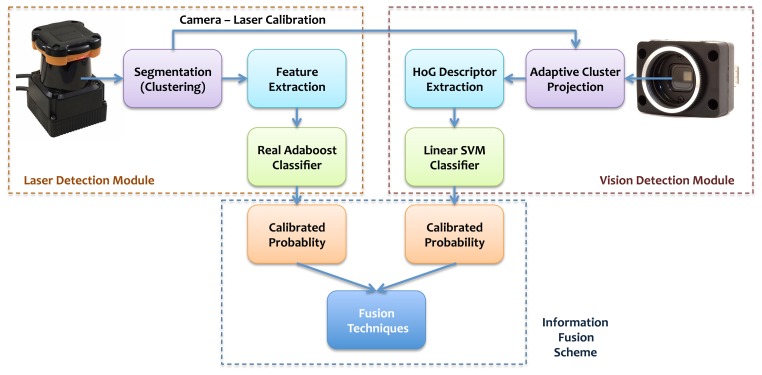
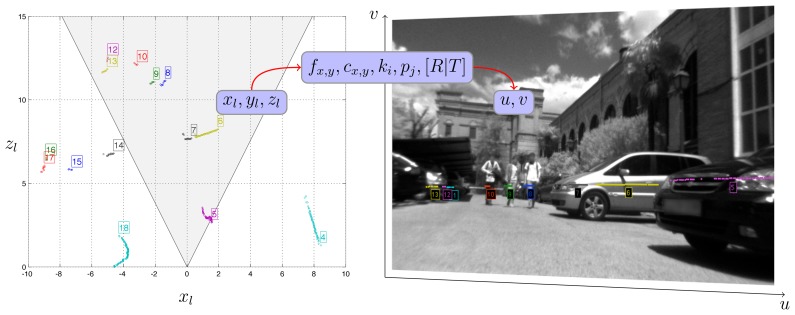
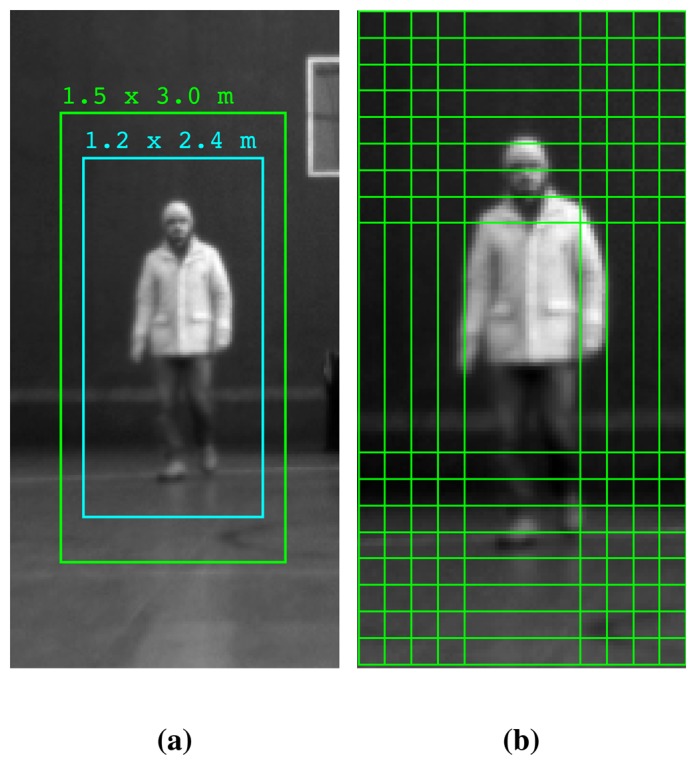
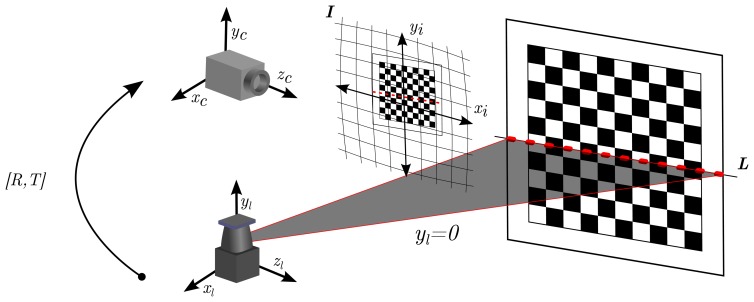
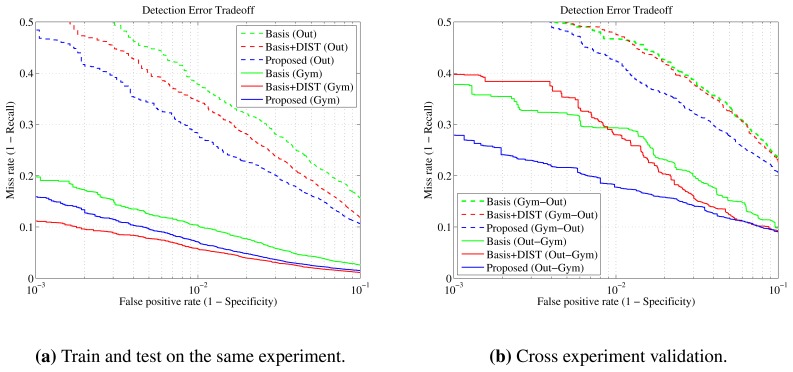
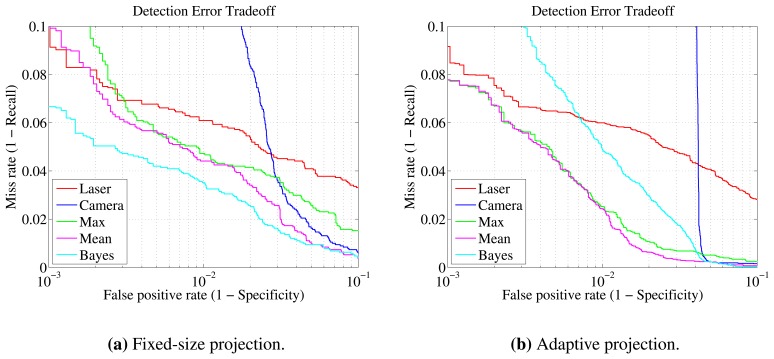
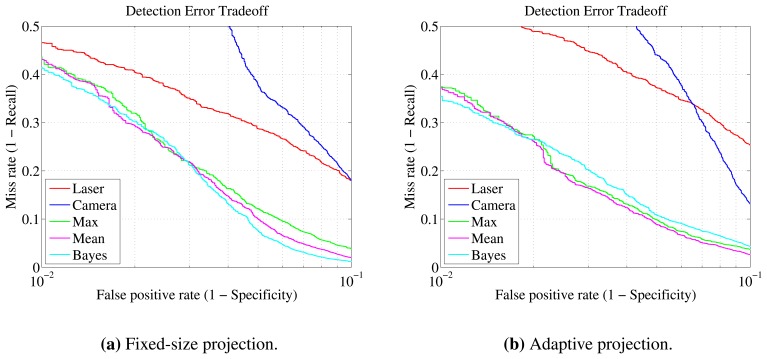
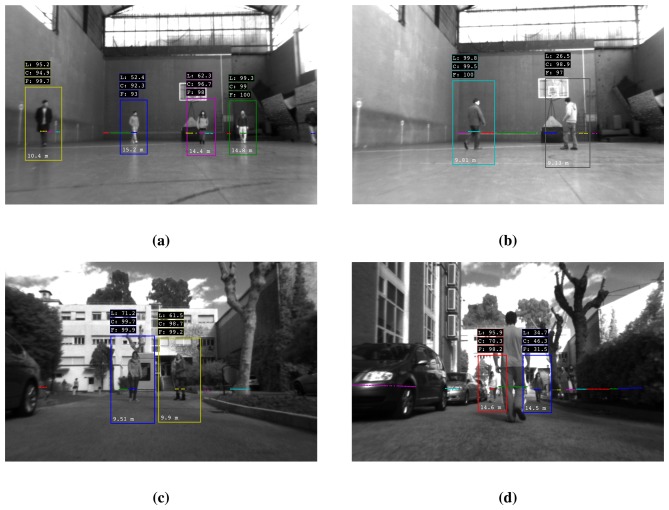
This paper presents a human detection system that can be employed on board a mobile platform for use in autonomous surveillance of large outdoor infrastructures. The prediction is based on the fusion of two detection modules, one for the laser and another for the vision data. In the laser module, a novel feature set that better encapsulates variations due to noise, distance and human pose is proposed. This enhances the generalization of the system, while at the same time, increasing the outdoor performance in comparison with current methods. The vision module uses the combination of the histogram of oriented gradients descriptor and the linear support vector machine classifier. Current approaches use a fixed-size projection to define regions of interest on the image data using the range information from the laser range finder. When applied to small size unmanned ground vehicles, these techniques suffer from misalignment, due to platform vibrations and terrain irregularities. This is effectively addressed in this work by using a novel adaptive projection technique, which is based on a probabilistic formulation of the classifier performance. Finally, a probability calibration step is introduced in order to optimally fuse the information from both modules. Experiments in real world environments demonstrate the robustness of the proposed method.
Figures


References
-
- Valera M., Velastin S. Intelligent distributed surveillance systems: A review. IEEE Proc. Vis. Image Signal Process. 2005;152:192–204.
-
- Arras K., Mozos O., Burgard W. Using Boosted Features for the Detection of People in 2D Range Data. Proceedings of the IEEE International Conference on Robotics and Automation; Roma, Italy. 10–14 April 2007; pp. 3402–3407.
-
- Dollar P., Wojek C., Schiele B., Perona P. Pedestrian detection: An evaluation of the state of the art. IEEE Trans. Patt. Anal. Mach. Intell. 2012;34:743–761. - PubMed
-
- Mertz C., Navarro-Serment L.E., MacLachlan R., Rybski P., Steinfeld A., Supp A., Urmson C., Vandapel N., Hebert M., Thorpe C., et al. Moving object detection with laser scanners. J. Field Robot. 2013;30:17–43.
-
- Spinello L., Triebel R., Siegwart R. Multimodal Detection and Tracking of Pedestrians in Urban Environments with Explicit Ground Plane Extraction. Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems; Nice, France. 22–26 September 2008; pp. 1823–1829.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
