

Multisensory self-motion compensation during object trajectory judgments
- PMID: 24062317
- PMCID: PMC4318529
- DOI: 10.1093/cercor/bht247
Multisensory self-motion compensation during object trajectory judgments
Abstract
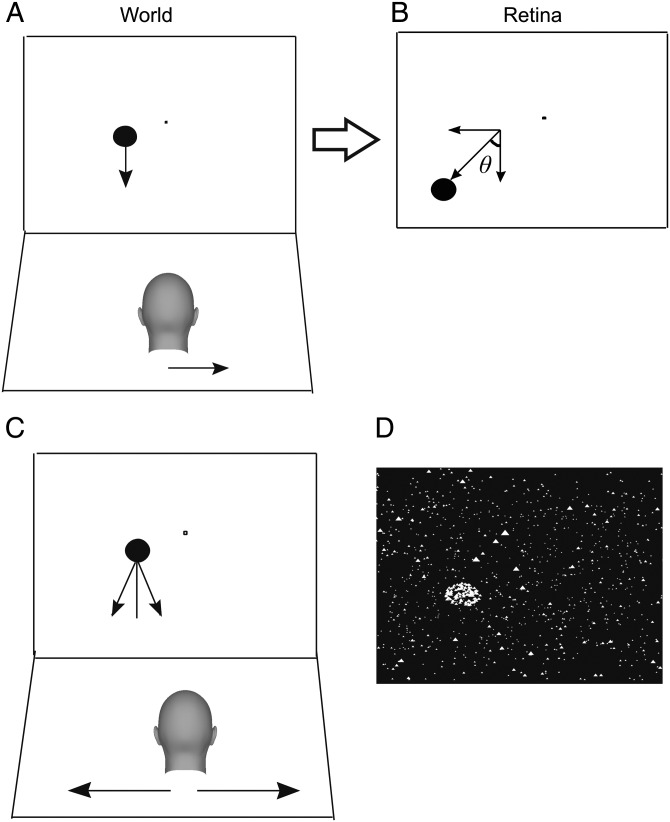
Judging object trajectory during self-motion is a fundamental ability for mobile organisms interacting with their environment. This fundamental ability requires the nervous system to compensate for the visual consequences of self-motion in order to make accurate judgments, but the mechanisms of this compensation are poorly understood. We comprehensively examined both the accuracy and precision of observers' ability to judge object trajectory in the world when self-motion was defined by vestibular, visual, or combined visual-vestibular cues. Without decision feedback, subjects demonstrated no compensation for self-motion that was defined solely by vestibular cues, partial compensation (47%) for visually defined self-motion, and significantly greater compensation (58%) during combined visual-vestibular self-motion. With decision feedback, subjects learned to accurately judge object trajectory in the world, and this generalized to novel self-motion speeds. Across conditions, greater compensation for self-motion was associated with decreased precision of object trajectory judgments, indicating that self-motion compensation comes at the cost of reduced discriminability. Our findings suggest that the brain can flexibly represent object trajectory relative to either the observer or the world, but a world-centered representation comes at the cost of decreased precision due to the inclusion of noisy self-motion signals.
Keywords: flow parsing; object motion; optic flow; self-motion; vestibular.
© The Author 2013. Published by Oxford University Press. All rights reserved. For Permissions, please e-mail: journals.permissions@oup.com.
Figures



Similar articles
-
The accuracy of object motion perception during locomotion.Front Psychol. 2023 Jan 12;13:1068454. doi: 10.3389/fpsyg.2022.1068454. eCollection 2022. Front Psychol. 2023. PMID: 36710725 Free PMC article.
-
Causal inference accounts for heading perception in the presence of object motion.Proc Natl Acad Sci U S A. 2019 Apr 30;116(18):9060-9065. doi: 10.1073/pnas.1820373116. Epub 2019 Apr 17. Proc Natl Acad Sci U S A. 2019. PMID: 30996126 Free PMC article.
-
Multisensory Integration of Visual and Vestibular Signals Improves Heading Discrimination in the Presence of a Moving Object.J Neurosci. 2015 Oct 7;35(40):13599-607. doi: 10.1523/JNEUROSCI.2267-15.2015. J Neurosci. 2015. PMID: 26446214 Free PMC article.
-
Visual–Vestibular Integration for Self-Motion Perception.In: Murray MM, Wallace MT, editors. The Neural Bases of Multisensory Processes. Boca Raton (FL): CRC Press/Taylor & Francis; 2012. Chapter 31. In: Murray MM, Wallace MT, editors. The Neural Bases of Multisensory Processes. Boca Raton (FL): CRC Press/Taylor & Francis; 2012. Chapter 31. PMID: 22593867 Free Books & Documents. Review.
-
The experience of force: the role of haptic experience of forces in visual perception of object motion and interactions, mental simulation, and motion-related judgments.Psychol Bull. 2012 Jul;138(4):589-615. doi: 10.1037/a0025587. Psychol Bull. 2012. PMID: 22730922 Review.
Cited by
-
A Neural Model of MST and MT Explains Perceived Object Motion during Self-Motion.J Neurosci. 2016 Aug 3;36(31):8093-102. doi: 10.1523/JNEUROSCI.4593-15.2016. J Neurosci. 2016. PMID: 27488630 Free PMC article.
-
The accuracy of object motion perception during locomotion.Front Psychol. 2023 Jan 12;13:1068454. doi: 10.3389/fpsyg.2022.1068454. eCollection 2022. Front Psychol. 2023. PMID: 36710725 Free PMC article.
-
Causal inference accounts for heading perception in the presence of object motion.Proc Natl Acad Sci U S A. 2019 Apr 30;116(18):9060-9065. doi: 10.1073/pnas.1820373116. Epub 2019 Apr 17. Proc Natl Acad Sci U S A. 2019. PMID: 30996126 Free PMC article.
-
Investigating distortions in perceptual stability during different self-movements using virtual reality.Perception. 2022 Aug 9;51(10):3010066221116480. doi: 10.1177/03010066221116480. Online ahead of print. Perception. 2022. PMID: 35946126 Free PMC article.
-
Eye Movements in Darkness Modulate Self-Motion Perception.eNeuro. 2017 Jan 25;4(1):ENEURO.0211-16.2016. doi: 10.1523/ENEURO.0211-16.2016. eCollection 2017 Jan-Feb. eNeuro. 2017. PMID: 28144623 Free PMC article.
References
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
