

Motor unit recruitment by size does not provide functional advantages for motor performance
- PMID: 24144879
- PMCID: PMC3892468
- DOI: 10.1113/jphysiol.2013.262477
Motor unit recruitment by size does not provide functional advantages for motor performance
Abstract
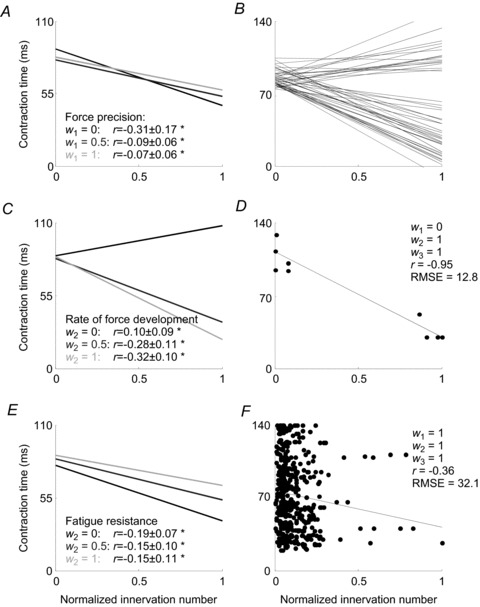
It is commonly assumed that the orderly recruitment of motor units by size provides a functional advantage for the performance of movements compared with a random recruitment order. On the other hand, the excitability of a motor neuron depends on its size and this is intrinsically linked to its innervation number. A range of innervation numbers among motor neurons corresponds to a range of sizes and thus to a range of excitabilities ordered by size. Therefore, if the excitation drive is similar among motor neurons, the recruitment by size is inevitably due to the intrinsic properties of motor neurons and may not have arisen to meet functional demands. In this view, we tested the assumption that orderly recruitment is necessarily beneficial by determining if this type of recruitment produces optimal motor output. Using evolutionary algorithms and without any a priori assumptions, the parameters of neuromuscular models were optimized with respect to several criteria for motor performance. Interestingly, the optimized model parameters matched well known neuromuscular properties, but none of the optimization criteria determined a consistent recruitment order by size unless this was imposed by an association between motor neuron size and excitability. Further, when the association between size and excitability was imposed, the resultant model of recruitment did not improve the motor performance with respect to the absence of orderly recruitment. A consistent observation was that optimal solutions for a variety of criteria of motor performance always required a broad range of innervation numbers in the population of motor neurons, skewed towards the small values. These results indicate that orderly recruitment of motor units in itself does not provide substantial functional advantages for motor control. Rather, the reason for its near-universal presence in human movements is that motor functions are optimized by a broad range of innervation numbers.
Figures








References
-
- Barry BK, Pascoe MA, Jesunathadas M, Enoka RM. Rate coding is compressed but variability is unaltered for motor units in a hand muscle of old adults. J Neurophysiol. 2007;97:3206–3218. - PubMed
-
- Bolstad G, Ersland A. Energy metabolism in different human skeletal muscles during voluntary isometric contractions. Eur J Appl Physiol Occup Physiol. 1978;38:171–179. - PubMed
-
- Burke RE. Some unresolved issues in motor unit research. Adv Exp Med Biol. 2002;508:171–178. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources