

Hydrodynamic analysis of different thumb positions in swimming
- PMID: 24150557
- PMCID: PMC3737786
Hydrodynamic analysis of different thumb positions in swimming
Abstract
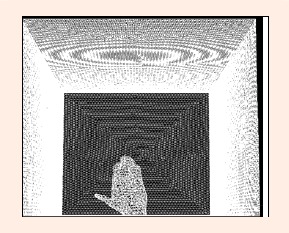
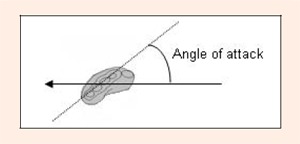
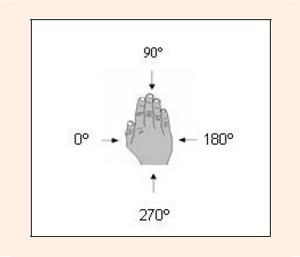
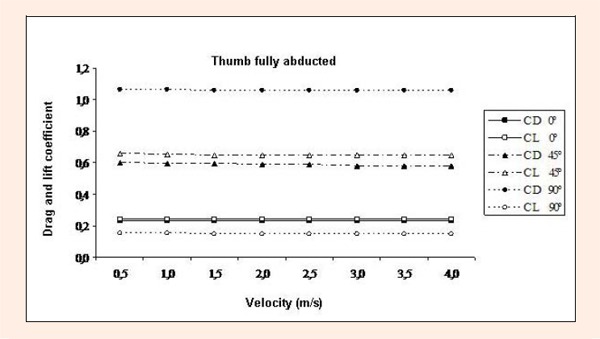
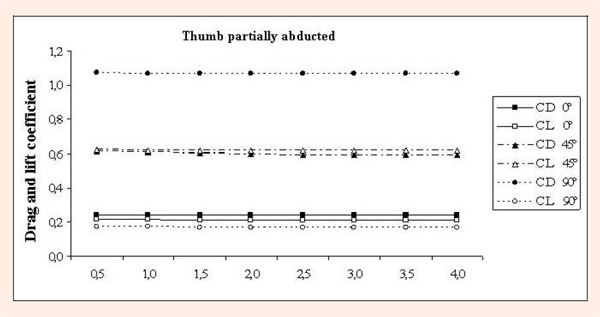
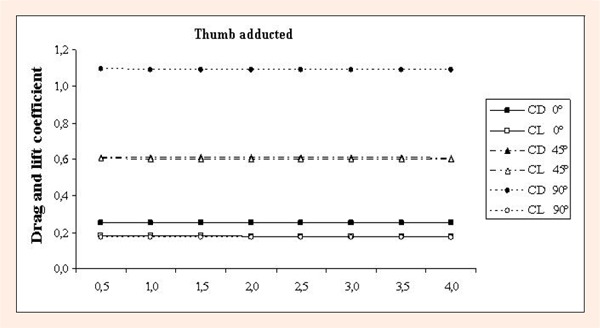
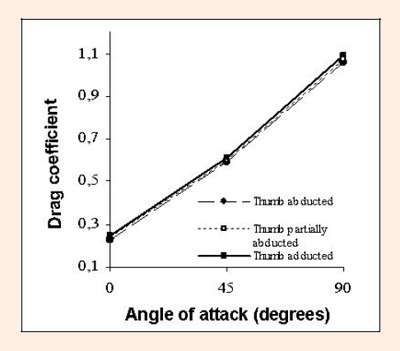
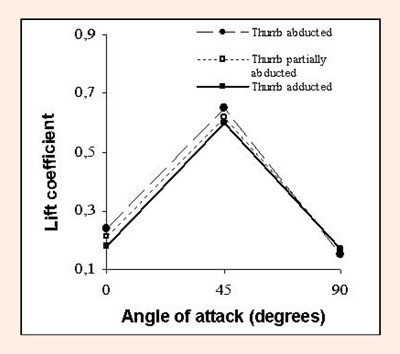
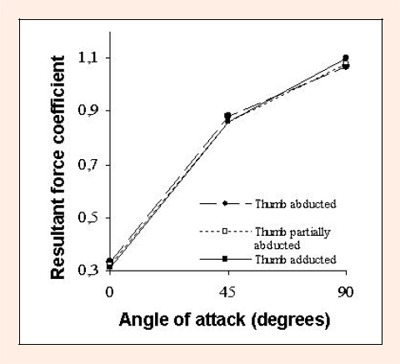
The aim of the present study was to analyze the hydrodynamic characteristics of a true model of a swimmer hand with the thumb in different positions using numerical simulation techniques. A three-dimensional domain was created to simulate the fluid flow around three models of a swimmer hand, with the thumb in different positions: thumb fully abducted, partially abducted, and adducted. These three hand models were obtained through computerized tomography scans of an Olympic swimmer hand. Steady-state computational fluid dynamics analyses were performed using the Fluent(®) code. The forces estimated in each of the three hand models were decomposed into drag and lift coefficients. Angles of attack of hand models of 0°, 45° and 90°, with a sweep back angle of 0° were used for the calculations. The results showed that the position with the thumb adducted presented slightly higher values of drag coefficient compared with thumb abducted positions. Moreover, the position with the thumb fully abducted allowed increasing the lift coefficient of the hand at angles of attack of 0° and 45°. These results suggested that, for hand models in which the lift force can play an important role, the abduction of the thumb may be better, whereas at higher angles of attack, in which the drag force is dominant, the adduction of the thumb may be preferable. Key pointsNumerical simulation techniques can provide answers to problems which have been unobtainable using experimental methods.The computer tomography scans allowed the creation of a complete and true digital anatomic model of a swimmer hand.The position with the thumb adducted presented slightly higher values of drag coefficient than the positions with the thumb abducted.The position with the thumb fully abducted allowed increasing the lift coefficient of the hand at angles of attack of 0 and 45 degrees.For hand positions in which the lift force can play an important role the abduction of the thumb may be better whereas at higher angles of attack, in which the drag force is dominant, the adduction of the thumb may be preferable for swimmers.
Keywords: Computational fluid dynamics; drag; finger; hand; lift.; reverse engineering.
Figures




References
-
- Alves F., Marinho D., Leal L., Rouboa A., Silva A. (2007) 3-D computational fluid dynamics of the hand and forearm in swimming. Medicine and Science in Sports and Exercise 39(Suppl. 1), S9
-
- Aritan S., Dabnichki P., Bartlett R. (1997) Program for generation of three-dimensional finite element mesh form magnetic resonance imaging scans of human limbs. Medical Engineering and Physics 19(8), 681-689 - PubMed
-
- Berger M.A., de Groot G., Hollander A.P. (1995) Hydrodynamic drag and lift forces on human hand arm models. Journal of Biomechanics 28(2), 125-133 - PubMed
-
- Berger M.A., de Groot G., Hollander A.P. (1997) Influence of hand shape on force generation during swimming. : Proceedings of the XII FINA World Congress on Sports Medicine. Eds: Eriksson B.O., Gullstrand L.Goteborg: Chalmers Reproservice; 389-396
-
- Berger M.A., Hollander A.P., de Groot G. (1999) Determining propulsive force in front crawl swimming: a comparison of two methods. Journal of Sports Sciences 117, 97-105 - PubMed
LinkOut - more resources
Full Text Sources